Gain sets – Delta RMC151 User Manual
Page 989
9 Register Reference
Using Acceleration Input, Filter, or Model
D
n
= - (J
Actual
n - J
Actual
n-1) x K
ADD
Using Force Input
D
n
= - (ΔF
Actual
n - ΔF
Actual
n-1) x K
ADD
where
D
n
= Active Damping Differential Term at sample n [% of maximum Control Output]
ΔF = Force Rate [Fr/sec]
J = Jerk [pu/sec
3
]
K
ADP
= Active Damping Differential Gain [%/(Fr/sec])] or [%/(pu/sec
3
])]
9.2.2.4.18. Gain Sets
Type: Axis Parameter Register
RMC70 Address: %MDn.60/7-11, where n = 12 + the axis number
RMC150 Address: %MDn.60/7-11, where n = 24 + the axis number
System Tag: _Axis[n].PriControlBits.GainSets, where n is the axis number
How to Find: Axes Parameters Pane, All tab: Position/Velocity Control
Data Type: Bits
Range: Single (0), "Pos, Vel" (1), "PID, I-PD" (2)
Default Value: Single (0)
Description
This parameter specifies the Gain Sets options for the axis. The default setting, Single, is
sufficient for most applications. If, on the same axis, you are using both position and
velocity control (Velocity PID or I-PD), or both a PID and an I-PD control mode, one of
the other Gain Set options will be useful.
When the Gain Sets parameter is set to two gain sets, the RMC automatically switches
between them according to the option. For example, if you select the Pos, Vel gain sets,
the RMC will use Gain Set #1 when it is in position control (as defined by the Current
Control Mode status register), and Gain Set #2 when it is in velocity control.
See the Gain Sets Overview for a more detailed discussion.
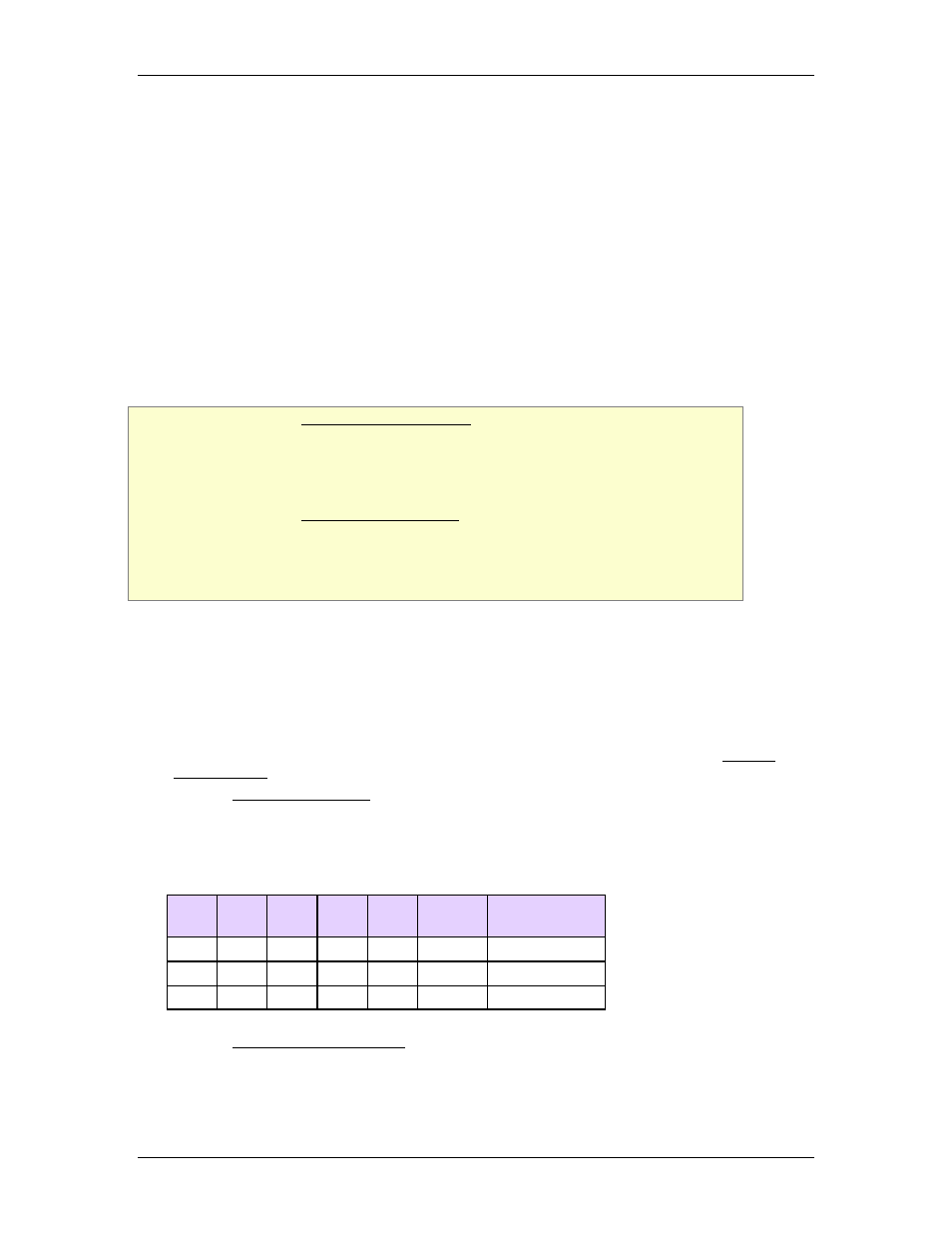
Format Details
This section is primarily for addressing the Velocity Filter Type parameter when
communicating with the RMC from an external device. This information is not necessary
when configuring this parameter in RMCTools.
Bit
11
Bit
10
Bit 9 Bit 8 Bit 7 Value
Control Mode
0
0
0
0
0 0
Single
0
0
0
0
1 1
Pos, Vel
0
0
0
1
0 2
PID, I-PD
See the Primary Control Register topic for details about the register containing these bits.
deltamotion.com
969