Delta RMC151 User Manual
Page 53
2 Starting Up the RMC
o
During the constant speed portion of the move, the Actual Position parallels
the Target Position.
If the system begins to oscillate, decrease the gain. In this step, do not expect the
Actual Position to track the Target Position very well during the move.
•
Once you gain control over the system, increase the speeds and accelerations of your
commands to values that will be used during normal machine operation.
Plots
Look at these plots for examples of good and bad plots at this step. Be aware that not all
systems will be like these examples.
Too little Proportional Gain
The Actual Position lags the Target Position and takes a long time to get to the Command
Position.
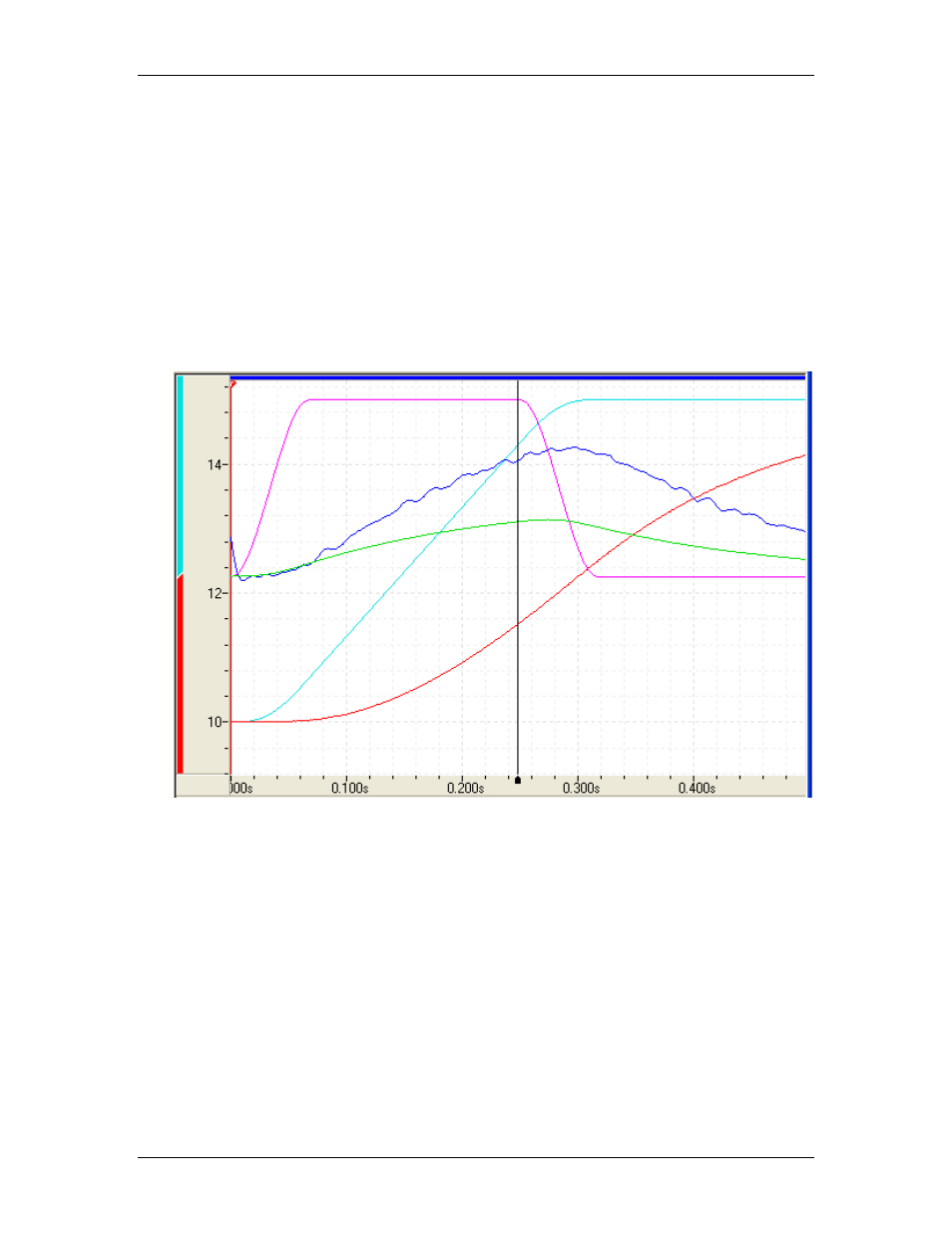
Too much Proportional Gain
The axis has started to oscillate, which is evident from the Actual Speed and Control
Output.
deltamotion.com
33