Delta RMC151 User Manual
Page 805
8 Command Reference
that the axis will lock on to the requested profile, even if the Max Speed and Accel Rate
are slower than that of the profile.
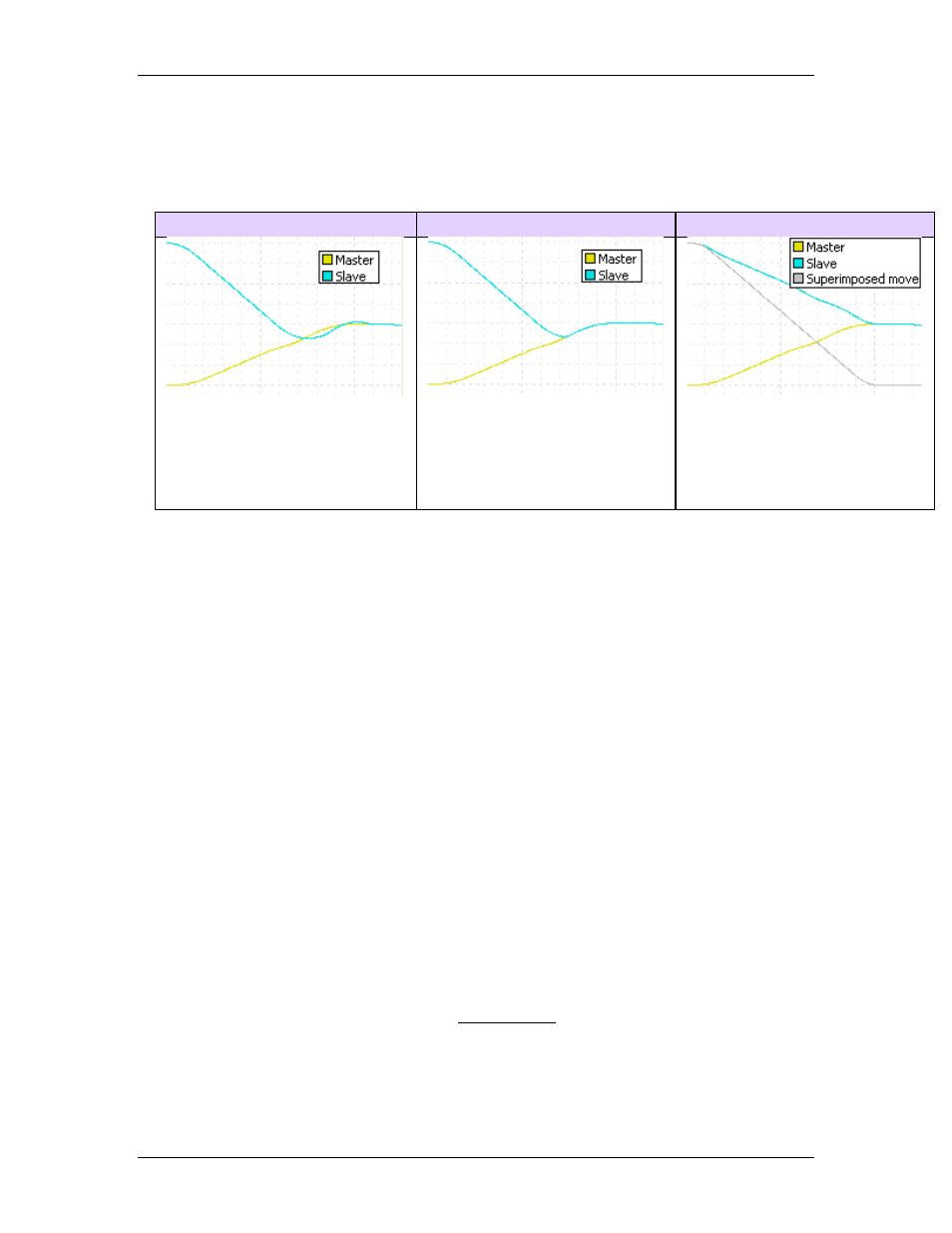
Shown below is an example of how the various options work for one sample profile.
Notice that the behavior will vary for other profiles.
Seek
Reach
Superimposed
The Seek method waits until the
position and velocity are close
before locking in. If the master
was not accelerating or
decelerating, it would lock in
quicker.
The Reach method locks in as
soon as the position reaches the
master. This can cause a jerk in
the Target Position of the slave
axis.
The gray line shows the move
that is superimposed onto the
master, and results in the slave
target.
Rotary Axes
Transitions fully support rotary axes. The Direction options listed below define the
direction in which the axis should move to reach the desired starting position. The
starting position is determined at the time a motion command requiring the transition is
issued.
For the Negative, Nearest, Positive, and Current options, if the starting position value is
outside the valid range of the rotary axis, the starting position will be set within the valid
range using modulo arithmetic such that the position will be the same location within the
range.
•
Negative (-1)
The axis will move in the negative direction to reach the starting position.
•
Nearest (0)
The axis will move in the direction which in which the starting position is nearest to
the current Target Position.
•
Positive (1)
The axis will move in the positive direction to reach the starting position.
•
Current (2)
The axis will move in the direction of the current Target Velocity to reach the starting
position. If the current Target Velocity is zero, it will behave as the Nearest option.
•
Absolute (3)
The starting position is treated as a position on a linear axis; the axis begins moving
toward the starting position as if on a linear scale. If the position is outside of the valid
position range, the axis rotates through the number of revolutions required to reach
the position. Each time the Target Position wraps during the move, the Position
Unwind value is subtracted from the Command Position until the Command Position is
within the valid position range.
For more details and examples, see the Rotary Motion topic.
Status Bits
Pri. TG SI Busy (Primary Target Generator Superimposed Busy) Bit
deltamotion.com
785