Delta RMC151 User Manual
Page 1011
9 Register Reference
direction is set to match the direction of the current Target Velocity. When the axis is
stopped or in the open loop control, the control direction holds its last value, but may
be overridden using the Set Control Direction (96) command.
If, after automatic Unidirectional Mode is first enabled, the axis enters closed loop
using a Hold Current Position (5) command or similar means whereby the Target
Velocity is zero, then the control direction will be assumed to be positive until a
directional move is started.
This option assumes that the user has switched the directional valve prior to
changing the direction of the axis’s target profile. Failure to do so may result in
runaway conditions.
The axis must be in open loop control when the Unidirectional Mode parameter is
changed.
Using the Set Control Direction Command
In Positive or Negative mode, issue the Set Control Direction (96) command at any time
to set the desired direction.
In Automatic mode, the direction is determined based on the Target Velocity. The Set
Control Direction (96) command may still be used while the axis is stopped to indicate a
change in the system direction prior to a move command. Notice that issuing this
command will have no effect in Automatic mode while the target profile is moving.
For many systems, this command is unnecessary, because the Automatic option handles
direction changes very well for most two-valve systems, and for a unidirectional belt, the
direction is set by the Unidirectional Mode parameter on startup and never needs to be
changed after that.
The Set Control Direction command can be issued while the axis in closed loop control.
Pressure and Force Control
Pressure/Force Control
Unidirectional Mode can be used in Pressure/Force Control mode, although automatic
direction detection is not supported. Therefore, Automatic mode will behave the same as
Positive mode.
Pressure/Force Limit
Unidirectional Mode works normally when Pressure/Force Limit is active. That is, for open
loop with Pressure/Force Limit, Unidirectional Mode does not affect the output, and for
position or velocity control with Pressure/Force Limit, the Control Output will have the
Unidirectional Mode applied to it based on the perceived position/velocity direction.
Interaction with other Output Parameters
The Unidirectional Mode is applied before the Output Bias and the Invert Output Polarity.
Therefore, the Output Bias can be adjusted to any value as usual. The Invert Output
Polarity can be used to change the Control Output to the negative range.
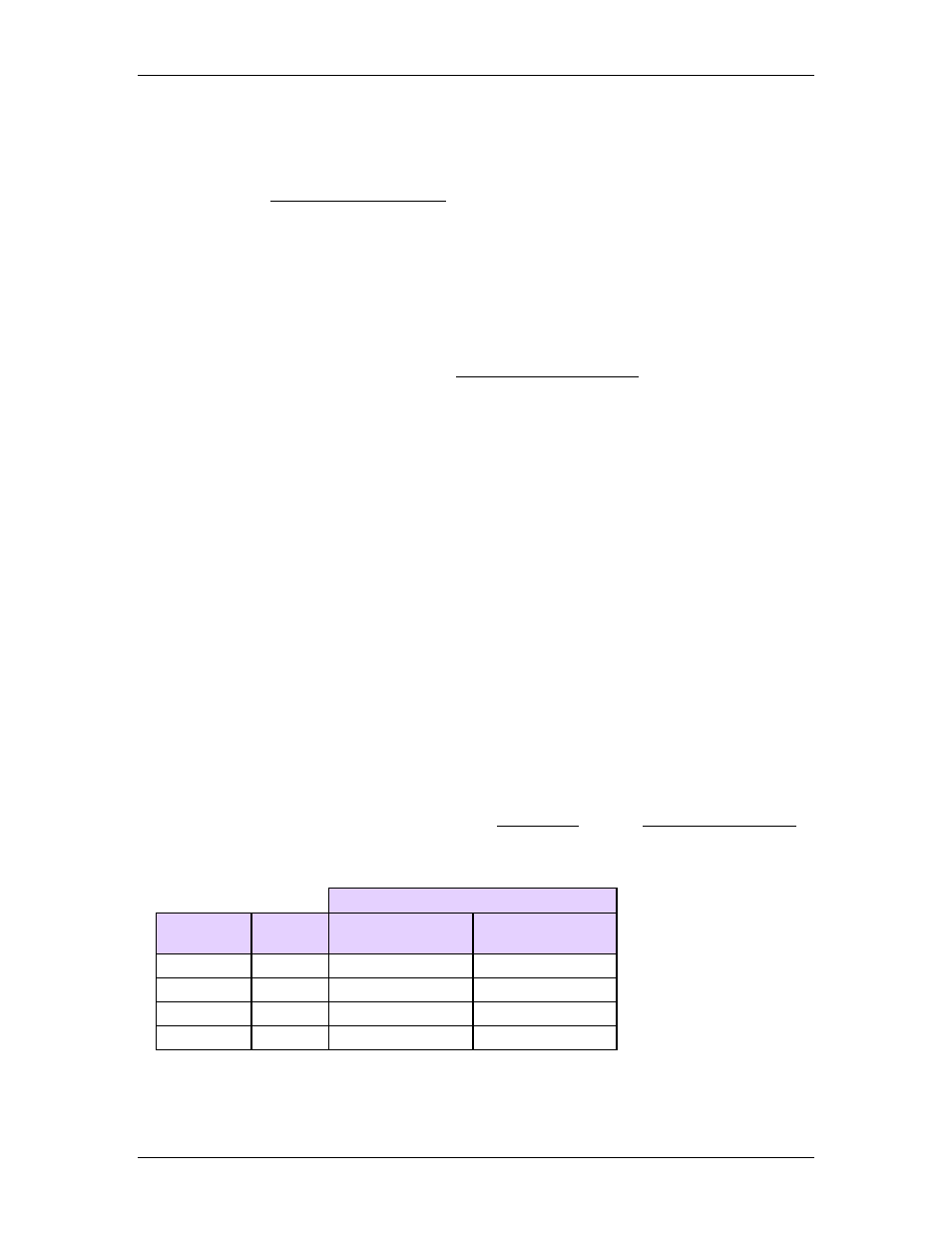
This chart summarizes how the Invert Output Polarity works with Unidirectional Mode:
Control Output
Control
Direction
PFID
Output
Normal
Output Polarity
Inverted
Output Polarity
Positive
<0
0
0
Positive
≥0
0..10V
0..-10V
Negative
≤0
0..10V
0..-10V
Negative
>0
0
0
Format Details
deltamotion.com
991