Command: feed forward adjust (69), Feed forward adjust (69) – Delta RMC151 User Manual
Page 840
RMC70/150 and RMCTools User Manual
Firmware Requirement: 1.50 or newer
See the Commands Overview topic for basic command information and how to issue
commands from PLCs, HMIs, etc.
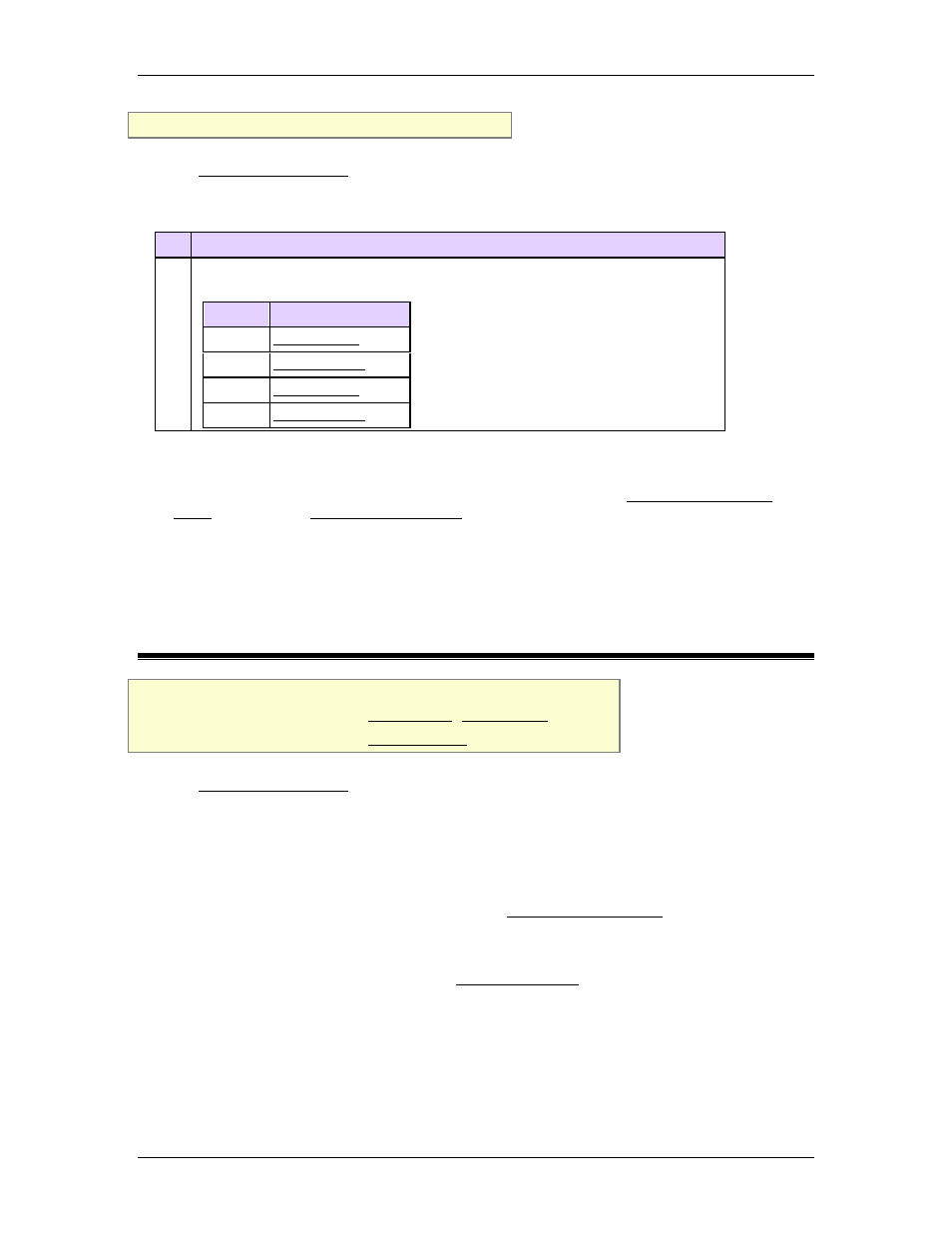
Command Parameters
# Parameter Description
1 Control Mode
Values Control Mode
0
1
4
5
Description
This command selects the closed loop control mode to be used when the next position or
velocity motion command is issued. This command updates the Next Pos/Vel Control
Mode register. The Current Control Mode register indicates the current control mode.
This command is an immediate command. Each step in a user program can have a
maximum of one non-immediate command per axis. There is no limit to the number of
immediate commands in a single step of a user program.
8.6.5. Command: Feed Forward Adjust (69)
Supported Axes: Position and Velocity Control Axes
Supported Control Modes: Position PID, Velocity PID
Firmware Requirement: 3.20 or newer
See the Commands Overview topic for basic command information and how to issue
commands from PLCs, HMIs, etc.
Command Parameters
None.
Description
This command is used to automatically set the Velocity Feed Forward values for position
or velocity axes. After a closed-loop move is made where the axis reaches constant
velocity with zero acceleration and jerk, issuing this command will set the Feed Forward
for the direction last moved. The new Feed Forward value will be applied immediately.
This command will have no effect if the Output Saturated bit is set or the axis is pressure
or force limited.
This command can also be used when manually tuning an axis, but is not as accurate as
autotuning. If the valve has deadband, this command may be more accurate than
autotuning. This command can also be used during machine operation to adjust the
Velocity Feed Forwards for changing system dynamics.
820
Delta Computer Systems, Inc.