Delta RMC151 User Manual
Page 787
8 Command Reference
•
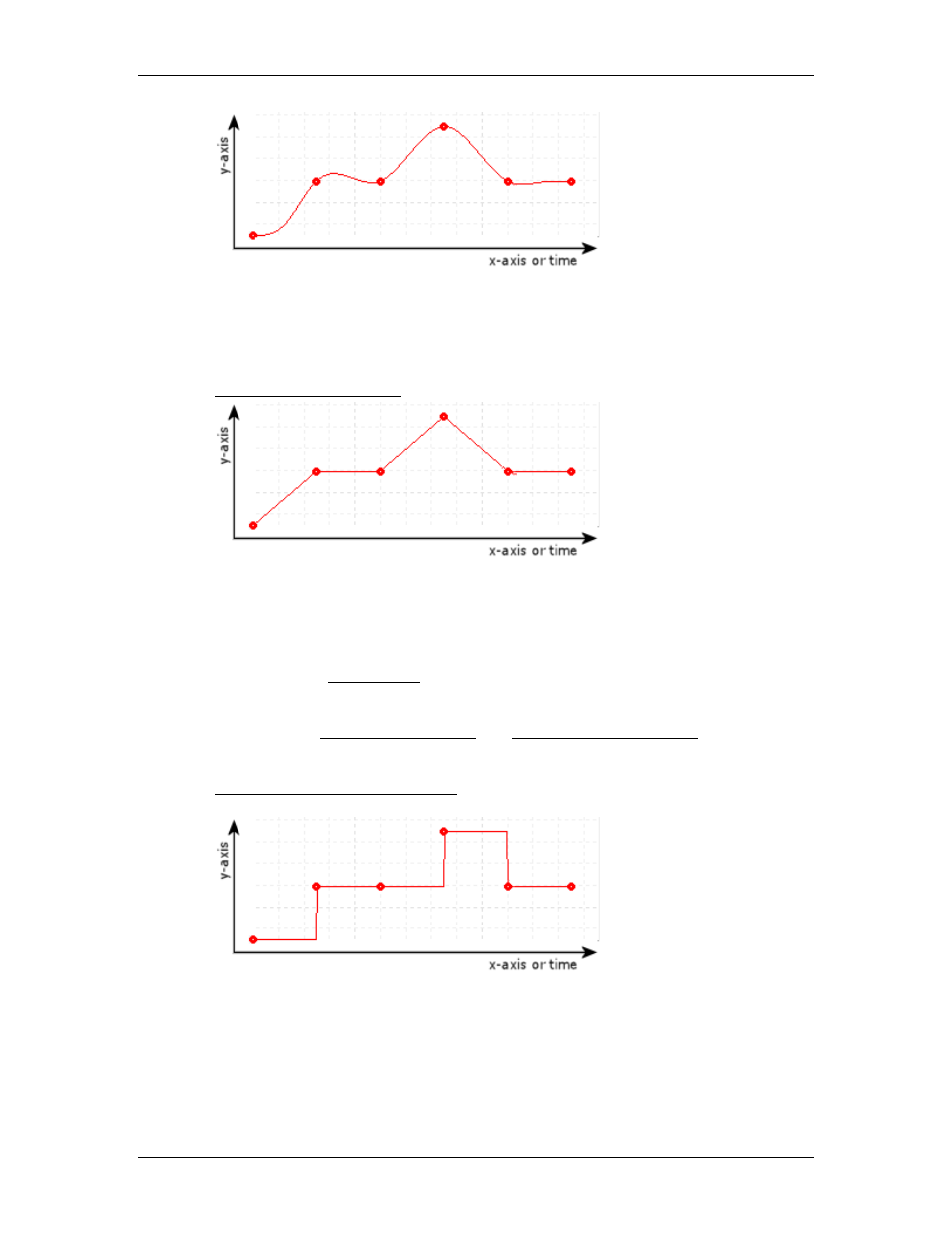
Linear (1)
The curve will consist of straight-line segments between each point. Because the
velocity is not continuous, a position axis will tend to overshoot at each point. This
type of curve is typically more suitable for pressure or force axes.
On position axes, the Target Acceleration will always be zero. Therefore, the
Acceleration Feed Forward will have no effect for linear interpolated curves.
•
Constant (0)
The curve will consist of step jumps to each point. The curve will not be continuous.
This method is seldom used, but may be useful in applications where step jumps
are desired, such as some blow-molding systems. This method requires that the
axis not be tuned very tightly, or the axis may oscillate and Output Saturated errors
may occur. The Position I-PD control algorithm is recommended for following
constant interpolated curves.
On position axes, the Target Velocity and Target Acceleration will always be zero.
Therefore, the Velocity Feed Forward and Acceleration Feed Forward will have no
effect for constant interpolated curves.
On pressure or force axes, the Target Rate will always be zero. Therefore, the
Pressure/Force Rate Feed Forward will have no effect for constant interpolated
curves.
Life Cycle
Determines how long the curve is stored:
•
Standard (0)
Added to curve store, but will not be saved to flash. Must be manually deleted.
Standard curves will not be included in the upload or download in the Curve Tool, but
can be viewed in the Curves in Controller window.
deltamotion.com
767