Delta RMC151 User Manual
Page 732
RMC70/150 and RMCTools User Manual
Special Notes
Do Not Send Move Absolute Commands in Rapid Succession
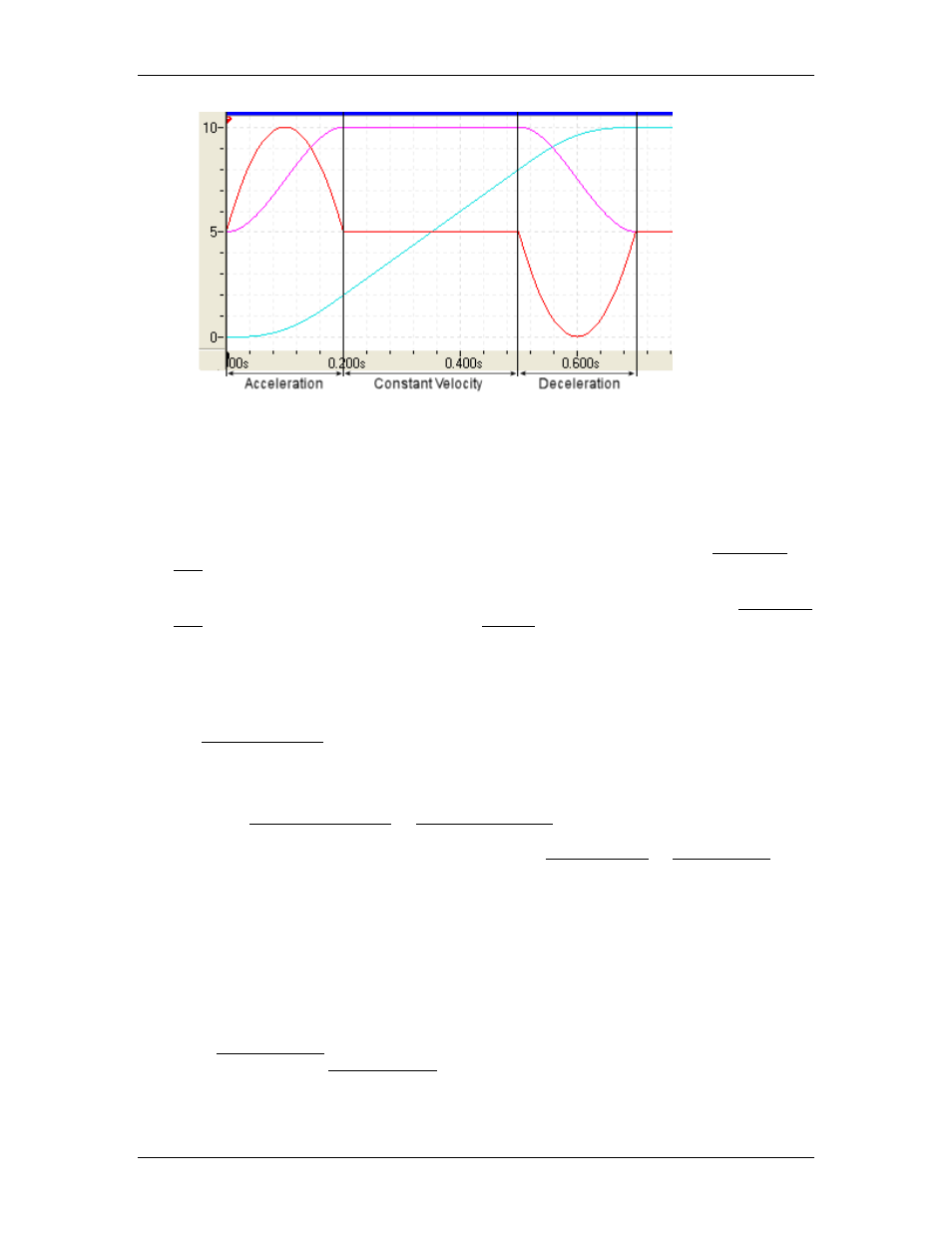
The Target Acceleration is reset to zero at the beginning of each move. Therefore,
sending the Move Absolute command in rapid succession can cause jerky motion or
overshoot, as described in the S-Curves vs. Trapezoidal section below.
It is possible to send the Move Absolute command in rapid succession if the Requested
Jerk Axis Parameter is set to zero.
If your axis must follow a reference input, do not constantly issue this command to the
axis to make it follow the position of the reference axis, unless you first set the Requested
Jerk Axis Parameter is set to zero. Or, use gearing instead.
Issuing Another Move Command Before Reaching Position
If you issued a Move command and, before it is completed, issue another Move command
to the same position and the new Deceleration Rate is equal to or smaller than the first
one, the target profile may have to overshoot the requested position in order to not
exceed the Deceleration rate. In cases where this may be a problem, it is better to use
the Speed at Position command with a Requested Velocity of zero. Then the target profile
will not overshoot the Requested position.
Moving in a Given Time
Sometimes, you may wish specify the amount of time the move must take. One option is
to use the Time Move Absolute or Time Move Relative command. However, the maximum
velocity cannot be specified with the Time Move command. You can use the equations
below to determine Speeds and Accelerations of the Move Absolute or Move Relative
command so that it will complete in a given amount of time:
Given
Distance = Distance to move ( Command Position - current Target Position)
MoveTime = Desired total time for move
then,
Speed = 1.5 * Distance / MoveTime
Acceleration = Deceleration = ( 4.5 * Distance ) / ( MoveTime * MoveTime )
S-Curves vs. Trapezoidal
If the Requested Jerk Axis Parameter is non-zero, the axis will use s-curves. This is the
default setting. If the Requested Jerk Axis Parameter is zero, then the axis will use a
trapezoidal profile.
712
Delta Computer Systems, Inc.