Delta RMC151 User Manual
Page 956
RMC70/150 and RMCTools User Manual
How to Find: Axes Parameters Pane, All tab: Feedback
Data Type: Bit
Range: A Leading (0), A Trailing (1)
Default Value: A Leading (0)
Description
This parameter is valid on Quadrature axes. The Z Home Location parameter specifies the
edge of the quadrature A signal on which a Z home is triggered. The Z Home Location
parameter is important for accurate directional homing with the Index (Z) pulse on a
quadrature encoder. Once the Z Home Location has been correctly set, you can home an
axis with the Z pulse in either direction of motion and it will set the home position at the
same count position each time. This type of homing is the most accurate homing method.
See the Homing topic for details.
Use the Learn Z Alignment (54) command to set the Index Z Home Location parameter.
Manually Setting the Index (Z) Home Location
The Learn Z Alignment (54) command is the easiest way to set the Z Home Location
parameter. If you wish to set this parameter manually instead, read this section for
details on the Z Home Location options.
The Z Home Location parameter can be set to the following:
•
A Leading (0)
•
A Trailing (1)
Choosing the Index (Z) Home Location
Choosing the Index (Z) Home Location option involves determining the state of the B
input at the leading edge of Z. 'Leading' is defined as the edge that will be rising when
the encoder is moving in the direction of increasing counts and falling when in the
direction of decreasing counts.
•
If the B signal is high at the leading edge of Z, or has a transition at the leading edge
of Z, choose A Leading.
•
If the B signal is low at the leading edge of Z, then choose A Trailing.
A Leading
The home is triggered on the leading edge of the A pulse after the leading edge of the Z
pulse. 'Leading' is defined as the edge that will be rising when the encoder is moving in
the direction of increasing counts and falling when in the direction of decreasing counts.
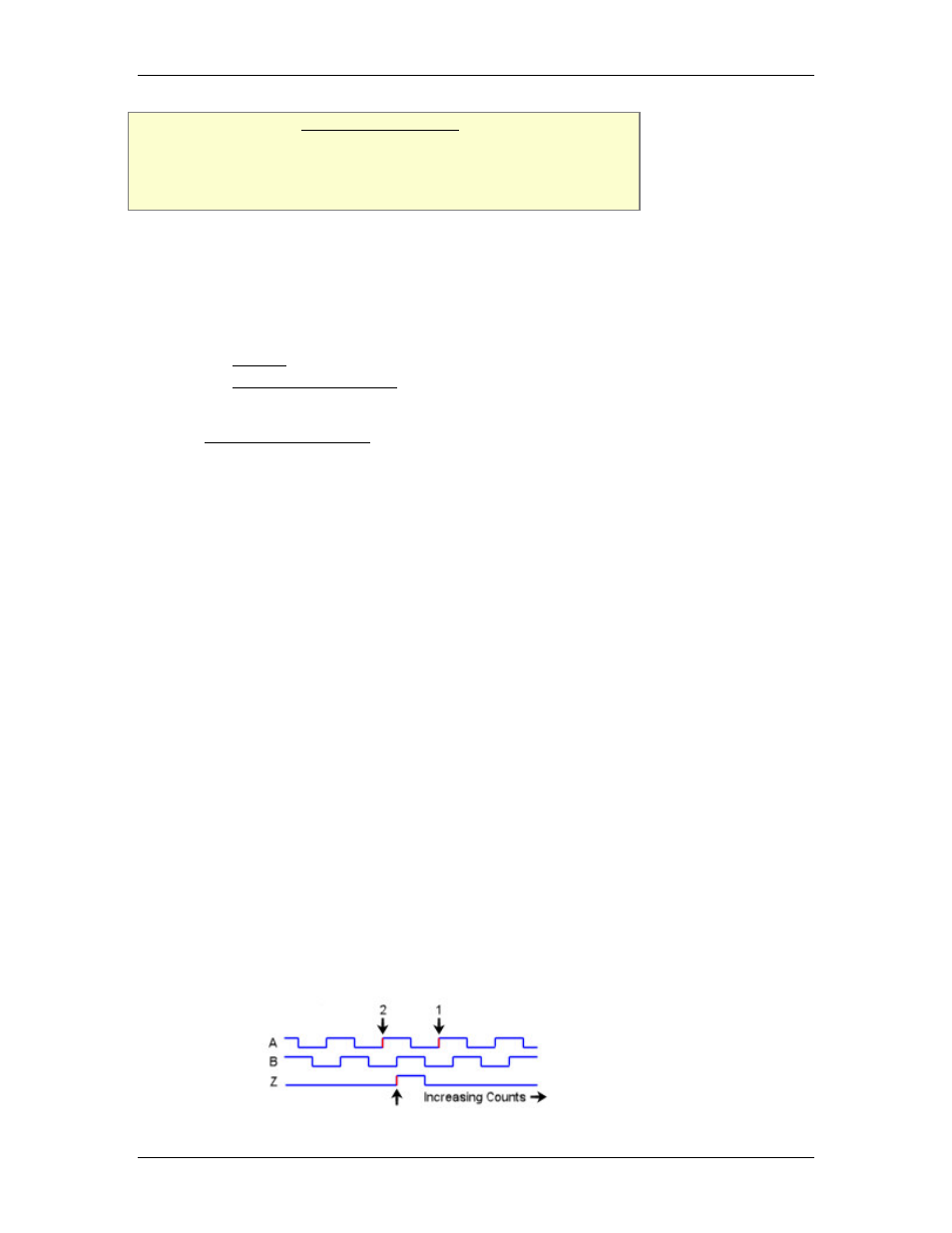
The leading edge of Z is indicated by the arrow in the figure below.
Therefore, when moving in the direction of increasing counts, the home is triggered on
the next rising edge of the A pulse after the rising edge Z pulse, as indicated by arrow
number 1 in the figure below.
When moving in the direction of decreasing counts, the home is triggered on the leading
edge (as seen in the direction of increasing counts) of the A pulse after the leading edge
Z pulse. Since the axis is moving in the direction of decreasing counts, it will trigger on
the falling edge indicated by arrow 2 in the figure below.
Notice that when the home is triggered, the RMC will automatically adjust the home
position for the direction so that the Home Position is set at the same count, regardless of
direction.
936
Delta Computer Systems, Inc.