Delta RMC151 User Manual
Page 747
8 Command Reference
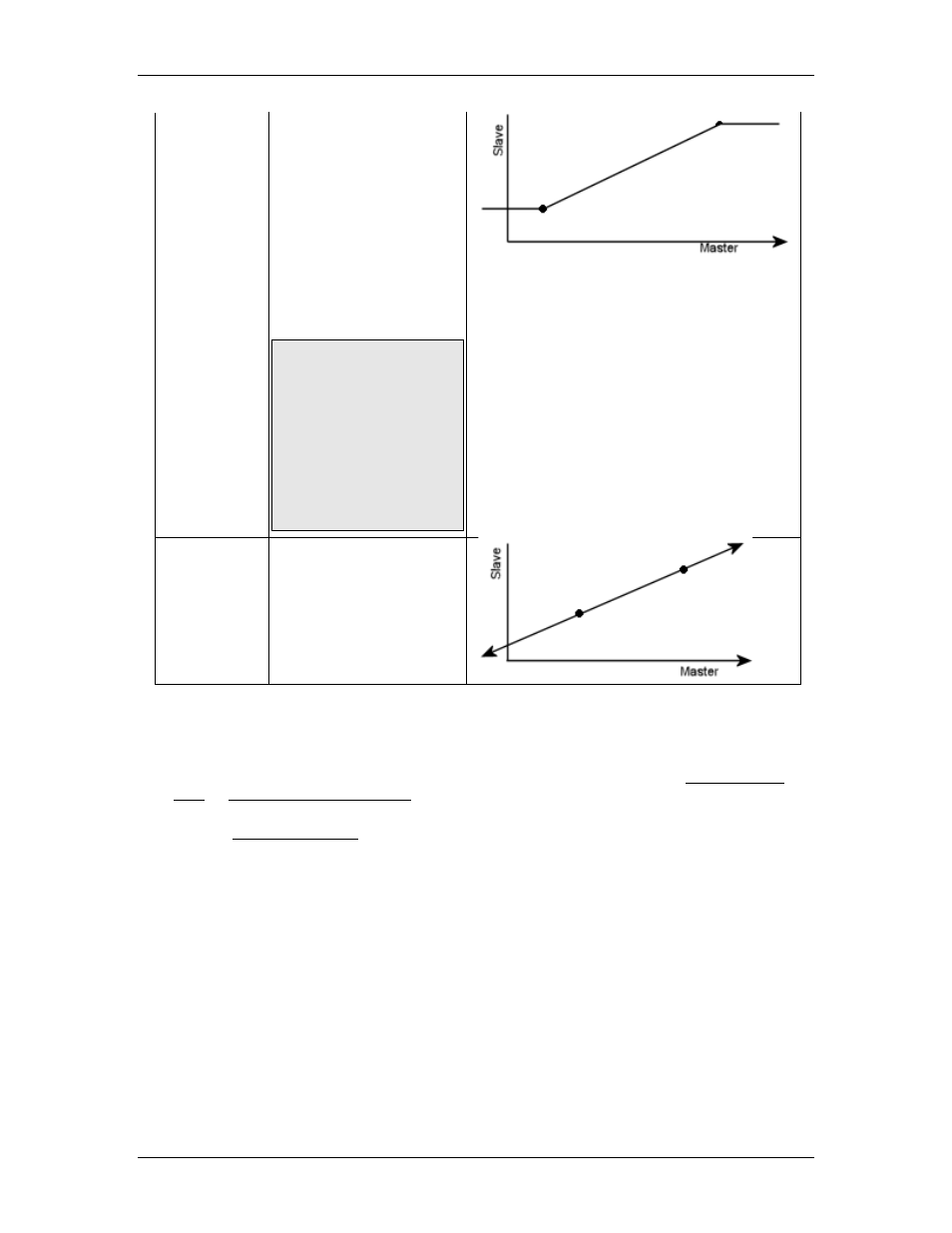
Truncate
If the master moves
past an endpoint, the
slave axis' Target
Position will stop at the
endpoint. When the
master moves back into
the range, the gearing
will resume. If the
master is moving
quickly when it exceeds
the endpoint, it may
cause the slave to stop
abruptly.
Note:
If a superimposed
transition is used, in
certain cases it can
cause the slave to
exceed the endpoints
during the transition. If
this causes problems,
consider using a
different type of
transition.
Extrapolate The slave will always
follow the master on the
linear relationship.
Related Commands
With the Gear Absolute command, the Target Position will follow the master value
exactly. If the master is noisy, or exceeds the position, velocity, or acceleration limits of
the slave axis, this can cause problems. In this case, consider using the Track Position
(57) or Track Position (I-PD) (58) commands, which provide limits on the slave axis
motion.
See the Gearing Overview topic for general information about gearing, including possible
Gear Masters.
Specifying a Register Address
When issuing this command from anywhere other than RMCTools, the addresses in the
Master Register command parameter must be entered as an integer value.
RMC addresses are represented in IEC format as:
%MDfile.element, where file = file number, and element = element number.
Use the following equation to convert a register address to integer format, N:
N = file * 4096 + element
Example:
Register address %MD8.33 is 8*4096 + 33 = 32801.
Target Generator State Bits
deltamotion.com
727