Command: open loop absolute (11), Open loop absolute (11) – Delta RMC151 User Manual
Page 723
8 Command Reference
Use this command when you want to give an Open Loop Control Output to the axis. Open
Loop is good for making the axis move when you don't care about going exactly at a
certain speed or reaching an exact position.
Target Generator State Bits
The Target Generator bits in the Status Bits register indicate which portion of the move
the axis is currently in. These bits are useful when programming complex motion
sequences.
Target Generator Done bit
This bit indicates the move is complete, which occurs when the Control Output has
reached the Requested Output.
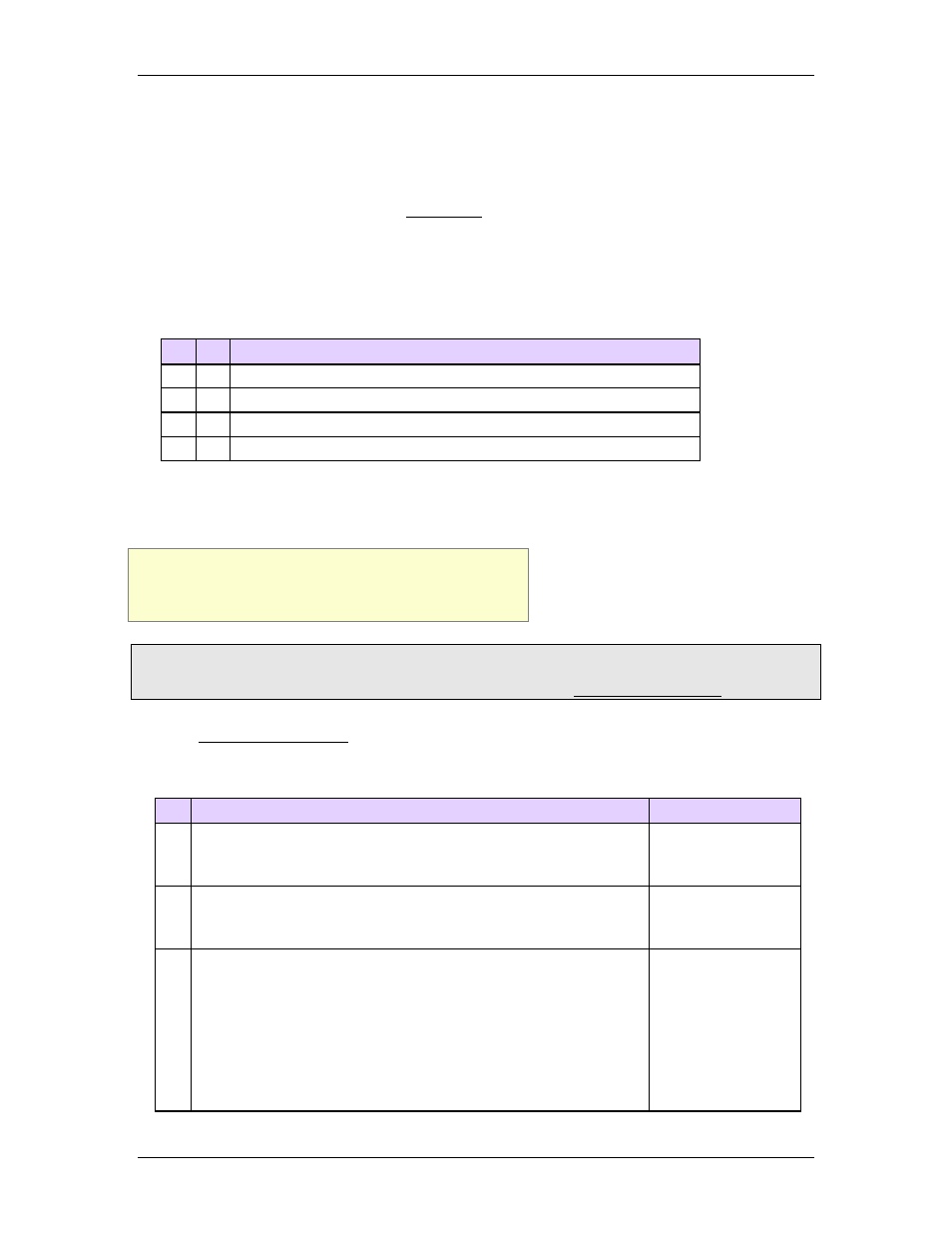
Target Generator State A and B bits
B
A Description
0
0
Constant Control Output at 0 volts
0
1
Ramping Control Output away from 0 volts
1
0
Constant Control Output at a non-zero voltage
1
1
Ramping Control Output toward 0 volts
8.4.3.3. Command: Open Loop Absolute (11)
Supported Axes: Position Control Axes
Supported Control Modes: All
Firmware Requirement: 1.00 or newer
Note:
This command is a specialized Open Loop command. Do not use before fully understanding
how it works! To simply issue an Open Loop output, use the Open Loop Rate (10) command.
See the Commands Overview topic for basic command information and how to issue
commands from PLCs, HMIs, etc.
Command Parameters
# Parameter Description
Range
1 Requested Output (V)
-10≤V≤10
See Limitations
below
2 Requested Position (position-units)
any
See Limitations
below
3 Direction
•
Negative* (-1)
•
Nearest (0)
•
Positive* (1)
•
Current* (2)
•
Absolute* (3)
a valid integer as
described
deltamotion.com
703