Delta RMC151 User Manual
Page 84
RMC70/150 and RMCTools User Manual
Control and Reference Axes
The types of axes available in the RMC are:
•
Control Axis: has one Control Output and control either zero, one or two feedback
quantities, such as Position, Velocity, Acceleration, Pressure, or Force.
•
Reference Axis: has an input for transducer feedback and does not have a Control
Output. A reference axis is not capable of controlling a system. Reference axes are
commonly used in gearing, synchronization, or monitoring applications. Virtual
reference axes are a special type that are not assigned to any hardware.
•
Cascading Outer Loop: A cascading outer loop axis is a control axis that provides a
virtual Control Output, and does not use a physical Control Output. For more details,
see the Cascade Control topic.
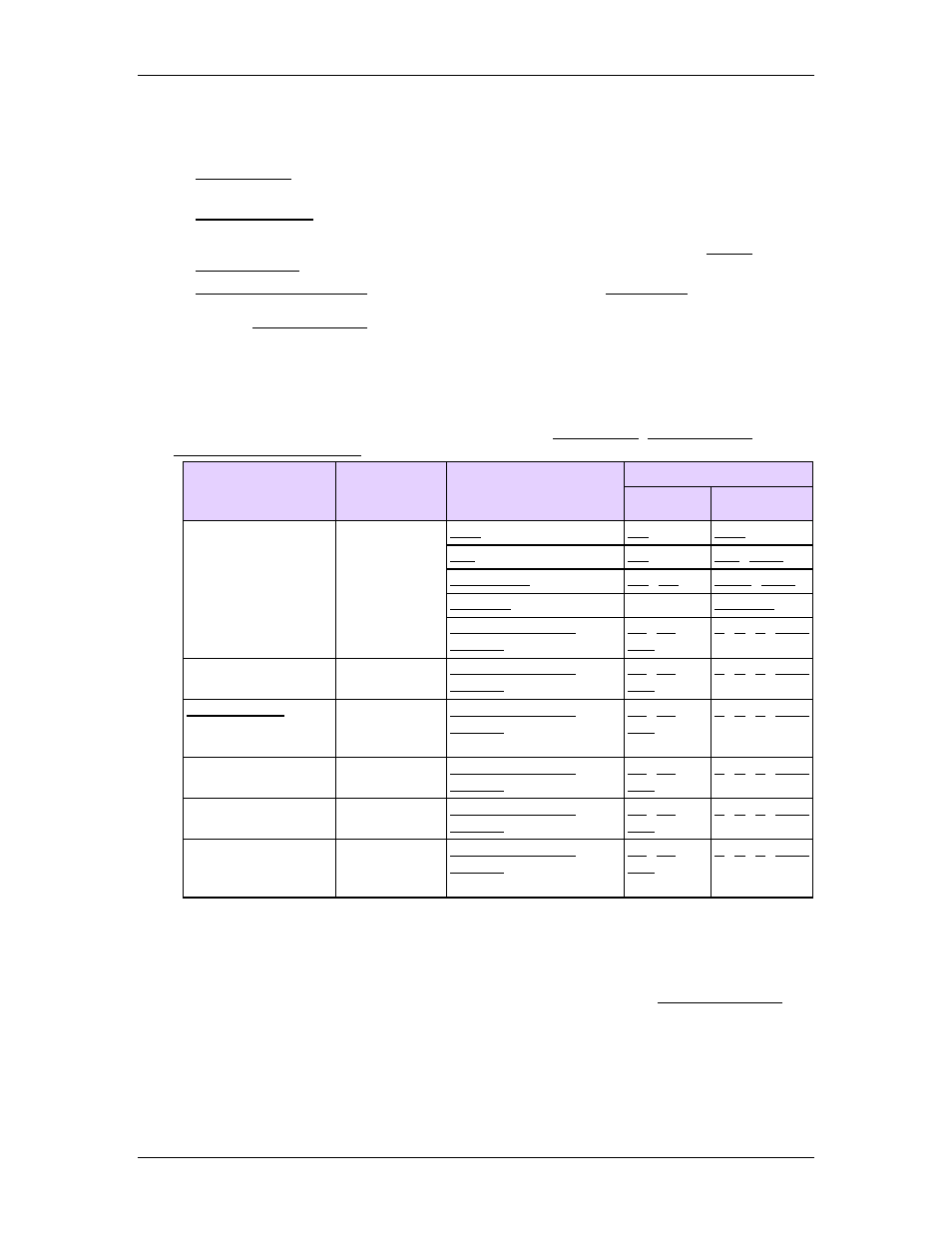
Axes Physical Feedback Types
The RMC supports the physical feedback types listed below. Notice that any type of
feedback (e.g. torque, temperature, etc.) can be controlled if the transducer is compatible
with the RMC.
Any of these feedback types can be used as part of a Control Axis, Reference Axis, or
Feedback Type
Transducer
Type
Supported
Transducer Output
Types
Possible Modules
RMC70
RMC150
Position
Notice that a
position feedback
control axis can also
control velocity.
position
Velocity
tachometer
(single- or dual-
input)
1 or 2
Pressure
pressure
sensor
Force
(single-input)
load cell
Force
(dual-input,
differential)
2 pressure
sensors
Custom Feedback
An axis' feedback can be defined as custom, which requires creating a user program to
continuously calculate the feedback value. This allows for using the sum, difference, or
average of other transducers as feedback. It also provides for switching feedback on-the-
fly, redundant feedback, and feedback linearization. For details, see Custom Feedback.
Dual Loop Control
The RMC supports dual-loop control. This is typically used for controlling two quantities,
such as position and force, with a single actuator. See the Dual-Loop Axes topic for
details.
64
Delta Computer Systems, Inc.