Delta RMC151 User Manual
Page 770
RMC70/150 and RMCTools User Manual
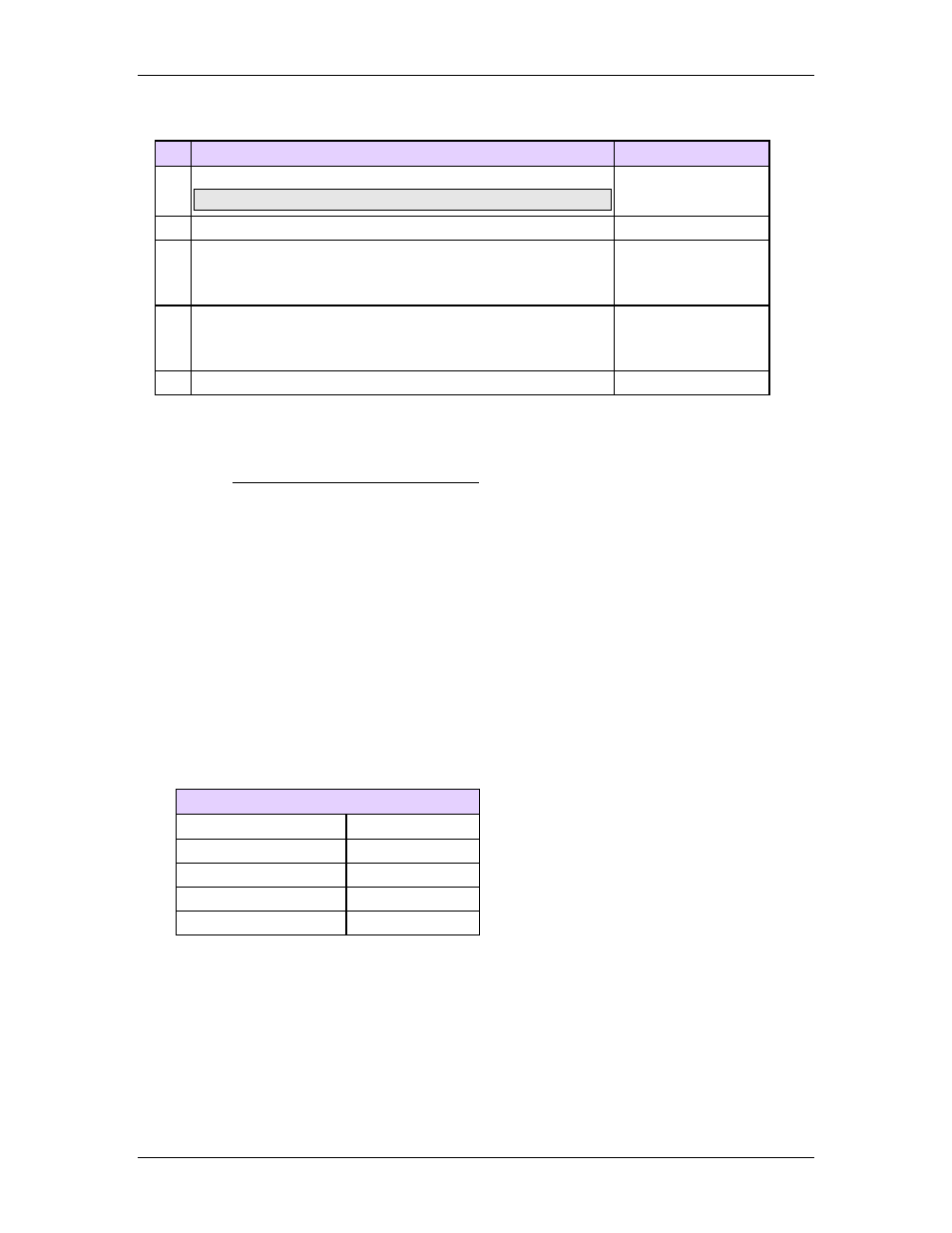
Command Parameters
# Parameter Description
Range
1 Master Register
Note: See Specifying a Register Address below.
Valid RMC register
2 Velocity Limit (position-units/s)
>0
3 Acceleration Limit (position-units/s
2
)
This value should typically be at least 10 times the
Velocity Limit.
>0
4 Jerk Limit (position-units/s
3
)
This value should typically be at least 20 to 100 times
the Acceleration Limit.
>0
5 Deadband (position-units)
≥0
Description
This command continuously tracks the specified Master Register. The axis Target
Position is limited by the specified Velocity Limit, Acceleration Limit, and Jerk Limit
and the Positive and Negative Travel Limits. This command is useful for smoothly tracking
a signal containing noise or step-jumps, or for gearing to another position while not
exceeding specified motion limits. The Deadband can be used to prevent the axis from
following small amounts of noise while the master signal is for all practical purposes
stopped.
Velocity, Acceleration, and Jerk Limits
It is very important that the Velocity Limit, Acceleration Limit, and Jerk Limit be set
correctly. Acceleration is the rate at which the velocity increases. Jerk is the rate at which
the acceleration increases. If the Acceleration Limit or Jerk Limit are set too low, the
axis can significantly overshoot the master value. The larger the Acceleration Limit and
Jerk Limit values are, the closer the axis will track. The Jerk Limit will especially affect
how the axis tracks all the quick, small changes of the master.
Typically, the Acceleration Limit should be at least 10 times the Velocity Limit, and
the Jerk Limit should be at least 20 to 100 times the Acceleration Limit.
For example, if Axis 0 should track the Axis 1 Actual Position and be limited to 10 in/sec,
then the Track (57) command could be sent as follows:
Track Position (57)
Master Register _Axis[1].ActPos
Velocity Limit 10
Acceleration Limit 100
Jerk Limit 10000
Deadband 0
Setting the velocity, acceleration, and jerk limits to properly follow a highly dynamic
signal can be challenging. To minimize overshoot, the acceleration and jerk limits should
be significantly larger than the acceleration and jerk components of the master. Delta
recommends that you test this command in the expected scenarios of your machine to
make sure it will work as expected during normal operation.
Deadband
If you wish to use the deadband, enter a value that is large enough to reject the expected
amount of noise on the Master Register. The deadband will begin to apply whenever the
750
Delta Computer Systems, Inc.