Model gain positive – Delta RMC151 User Manual
Page 932
RMC70/150 and RMCTools User Manual
Data Type: DINT
Range: Zero (0), First (1), Second (2), Undefined (255)
Default Value: Undefined (255)
Description
This parameter specifies the order of the feedback model. Separate models exist for
position and for pressure or force feedback. For more details, see the modeling topic.
Zero Order (0)
A zero-order system is a linear system with virtually no delay between the Control Output
and motion. The velocity of the system is proportional to the Control Output.
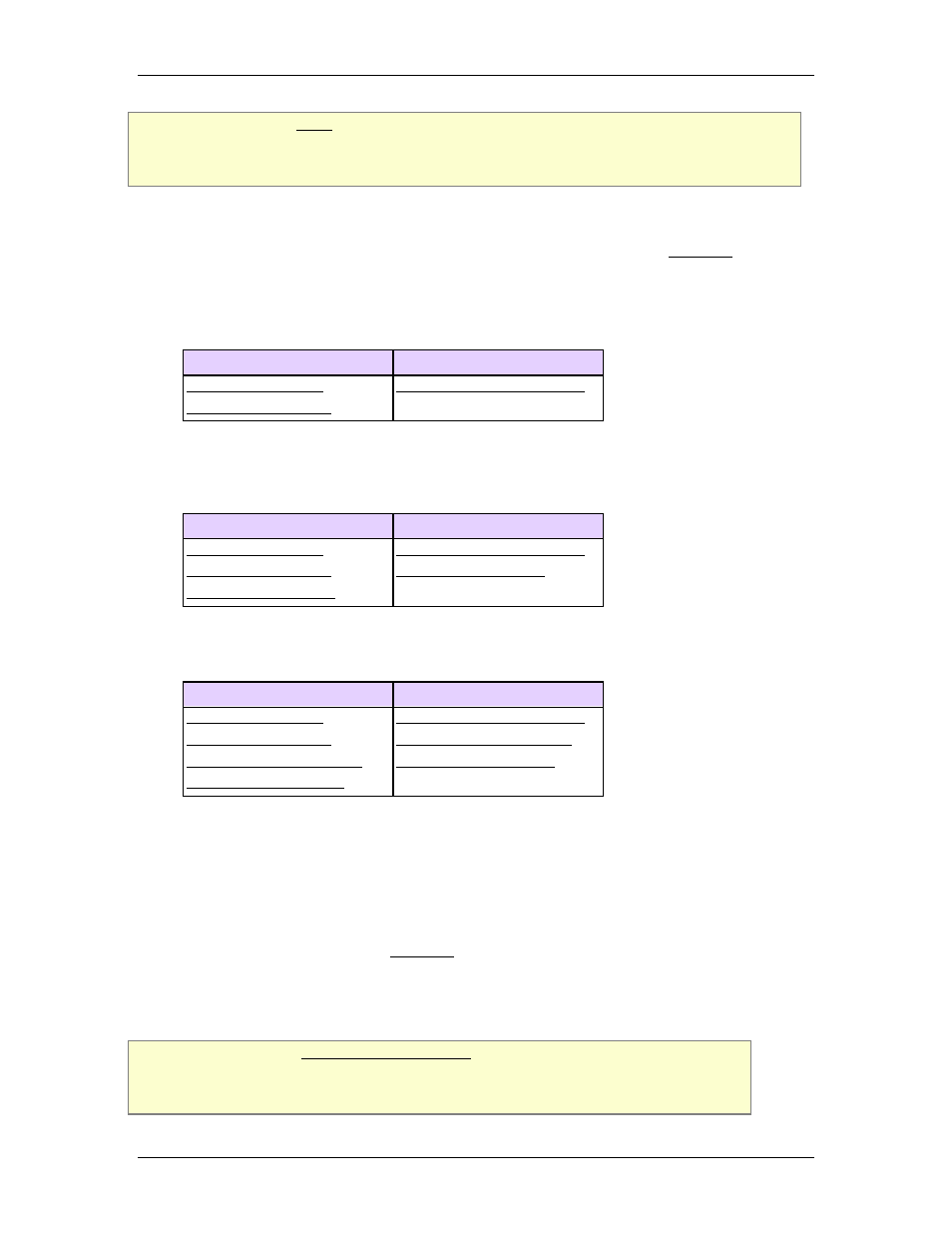
The following parameters define the zero-order model:
Position
Pressure or Force
Model Gain Positive
Model Gain Negative
First Order (1)
A first-order system is a linear system with a delay between the Control Output and
motion. At steady state, the velocity of the system is proportional to the Control Output.
The following parameters define the zero-order model:
Position
Pressure or Force
Model Gain Positive
Model Gain Negative
Model Time Constant
Model Gain Pressure/Force
Model Time Constant
Second Order (2)
A second order system behaves like a mass on a spring.
The following parameters define the second-order model:
Position
Pressure or Force
Model Gain Positive
Model Gain Negative
Model Natural Frequency
Model Damping Factor
Model Gain Pressure/Force
Model Natural Frequency
Model Damping Factor
Changing this Parameter
On position axes, always change this parameter only from Axis Tools for best results. If
the position feedback model is being used, it will be suspended until the last position
feedback model parameter register has been updated (Time Constant [Fx:152] for first
order or Damping Factor [Fx:153] for second order). At this point, the new feedback
model will be calculated and the model will be activated.
Certain position model parameter settings may result in an invalid model. If this occurs,
change your settings. See the modeling topic for more details.
9.2.2.2.20.10. Model Gain Positive
Type: Axis Parameter Register
RMC70 Address: %MDn.150, where n = 12 + the axis number
RMC150 Address: %MDn.150, where n = 24 + the axis number
912
Delta Computer Systems, Inc.