Command: advanced gear move (33), Advanced gear move (33) – Delta RMC151 User Manual
Page 765
8 Command Reference
This command allows reversing the direction of the master. If the master reverses
directions before the master has reached the Final Master Position, the slave will follow
the profile in reverse. If the master continues in reverse past the Initial Master Position,
no slave offset will be applied until the master returns to the Initial Master Position.
Once the master has reached the Final Master Position, the slave will continue gearing (as
directed from the previous gearing command) whether the master goes forward or
backward. It will not revert to the profile it followed before reaching the Final Slave
Position.
Specifying an Absolute Position
The Master Distance parameter is relative to the master position at the time this
command was issued. To specify an absolute position, use an Expression command that
calculates the Master Distance by subtracting the current master position from the
desired Final Master Position. For example, if the slave is gearing to the Axis 0 Target
Position, and you wish to do the Slave Offset by the time the master reaches 5 pu, then
use the following expression command:
MasterDist := 5 - _Axis[0].TarPos
where MasterDist is a variable defined in the variable table. Then use this variable in the
Master Distance parameter of this command.
Rotary Axes
The Slave Offset and Master Distance specify distances on the axes. These distances
are complete distances whether the axes are rotary or not. If both axes have a Position
Unwind of 1, and the Slave Offset is 2 and the Master Distance is 3, the slave will be
offset 2 pu, or 2 revolutions, while master moves 3 pu, or 3 revolutions. The sign of the
values indicates the direction.
Target Generator State Bits
The Target Generator bits in the Status Bits register indicate which portion of the move
the axis is currently in. These bits are useful when programming complex motion
sequences.
Target Generator Done bit
Set when the master position has reached the Final Master Position. The gear ratio is now
locked and will no longer change even if the master moves prior to the Final Master
Position.
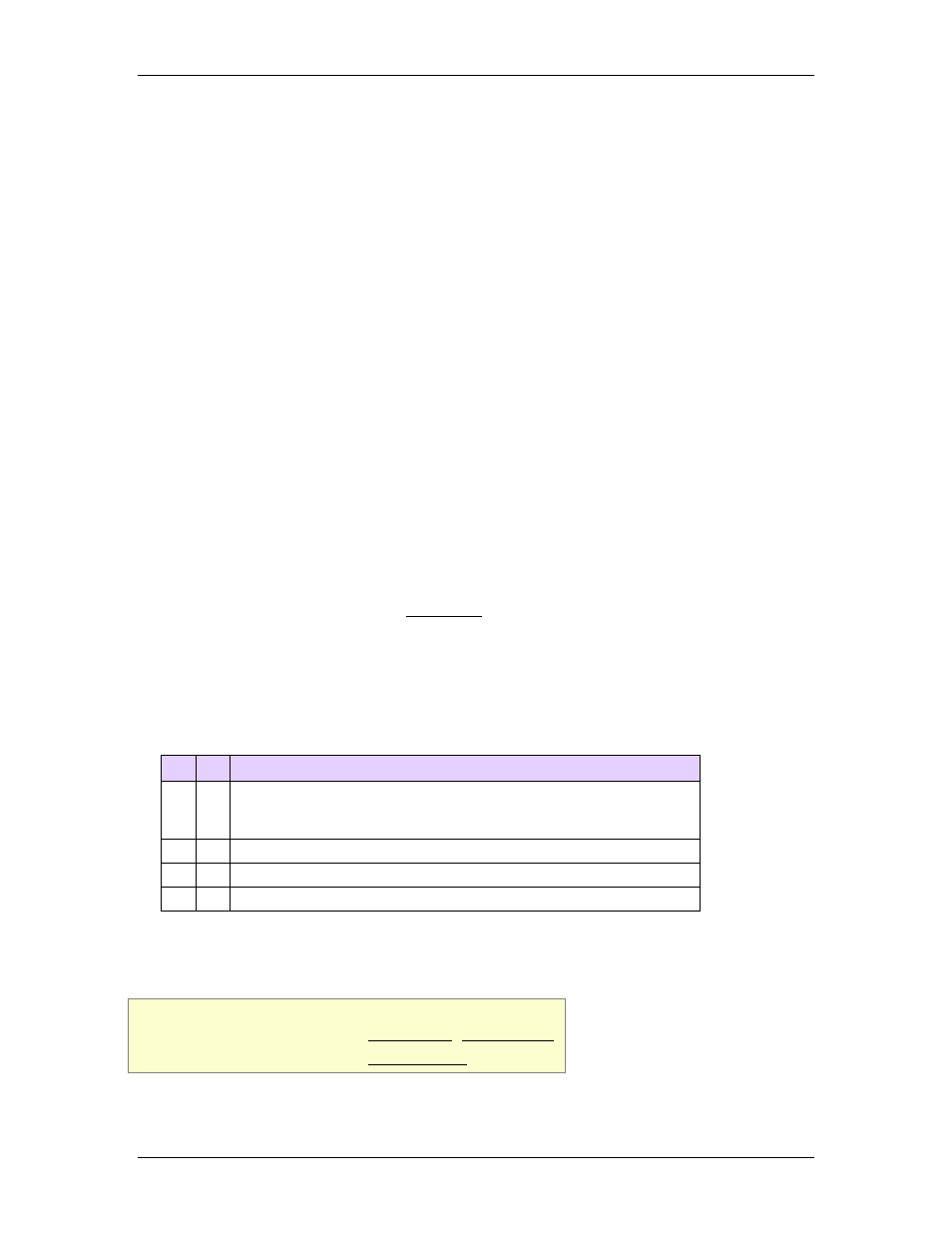
Target Generator State A and B bits
B
A Description
0
0
The master is at or beyond the Initial Master Position. Use the
Target Generator Done bit to determine if it has reached the
Final Master Position.
0
1
Reserved
1
0
The master is prior to the Initial Master Position.
1
1
Reserved
8.4.6.8. Command: Advanced Gear Move (33)
Supported Axes: Position Control Axes
Supported Control Modes: Position PID, Position I-PD
Firmware Requirement: 1.70 or newer
deltamotion.com
745