Rmc communications overview, Communication, E communications overview – Delta RMC151 User Manual
Page 413: Communication protocols
6. Communication
6.1. RMC Communications Overview
Numerous communication protocols are available on the RMC70 and RMC150. This allows
almost any external controller, such as a PLC, HMI, personal computer, etc. to control the RMC
and easily integrate it into the rest of the application.
The RMC functions as a slave (server) device on the communications. That is, the RMC only
responds to communication requests. It does not initiate reads or writes. The host controller
(PLC, HMI, etc.) must initiate all communication requests.
The RMC does not perform motion control on feedback via any communication channels. It
only controls motion on axes that are directly wired to the RMC's modules.
For basic information on how to read from, write to, and issue commands to the RMC, see the
links to the respective communication types below.
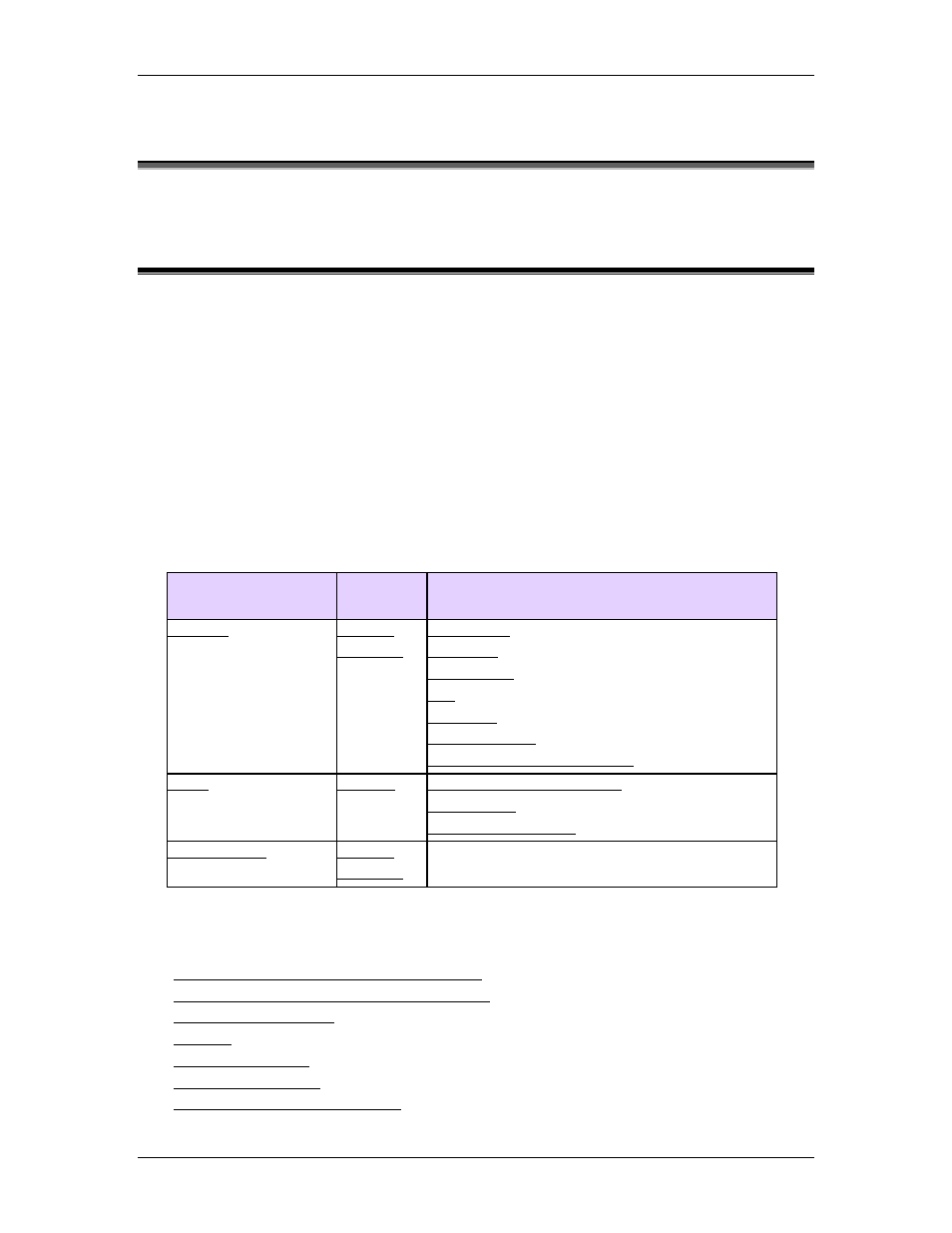
Primary Communications Types
The communication types listed below are available in the RMC family. For details on how
to set up and use each communication protocol, click on the respective link.
Communication Type
Supporting
RMC
Supported
Protocols
Ethernet (Slave)
EtherNet/IP
PROFINET
Modbus/TCP
CSP (Allen-Bradley)
FINS/UDP (Omron)
Procedure Exist (Mitsubishi Q-Series)
Delta Motion Control Protocol
Serial (Slave)
DF1 (Full- and Half-Duplex) (Allen-Bradley)
Modbus/RTU
Bidirectional Protocol (Mitsubishi Q-Series)
PROFIBUS-DP (Slave) RMC75P
Communicating Using Master Controllers
For information on how to communicate with an RMC from various master controllers, see
the topics below:
Allen-Bradley Controllers via Message Block
Allen-Bradley Controllers via EtherNet/IP I/O
AutomationDirect PLCs
GE PLCs
Mitsubishi Q-Series
Omron PLCs va FINS
Omron PLCs via EtherNet/IP I/O
deltamotion.com
393