Link types, Link types overview, Link – Delta RMC151 User Manual
Page 332: Link type, E link type
RMC70/150 and RMCTools User Manual
3. When the user program runs, if bits 0, 1, and 3 are set, then the command will be
sent to Axis 0, Axis 1, and Axis 3.
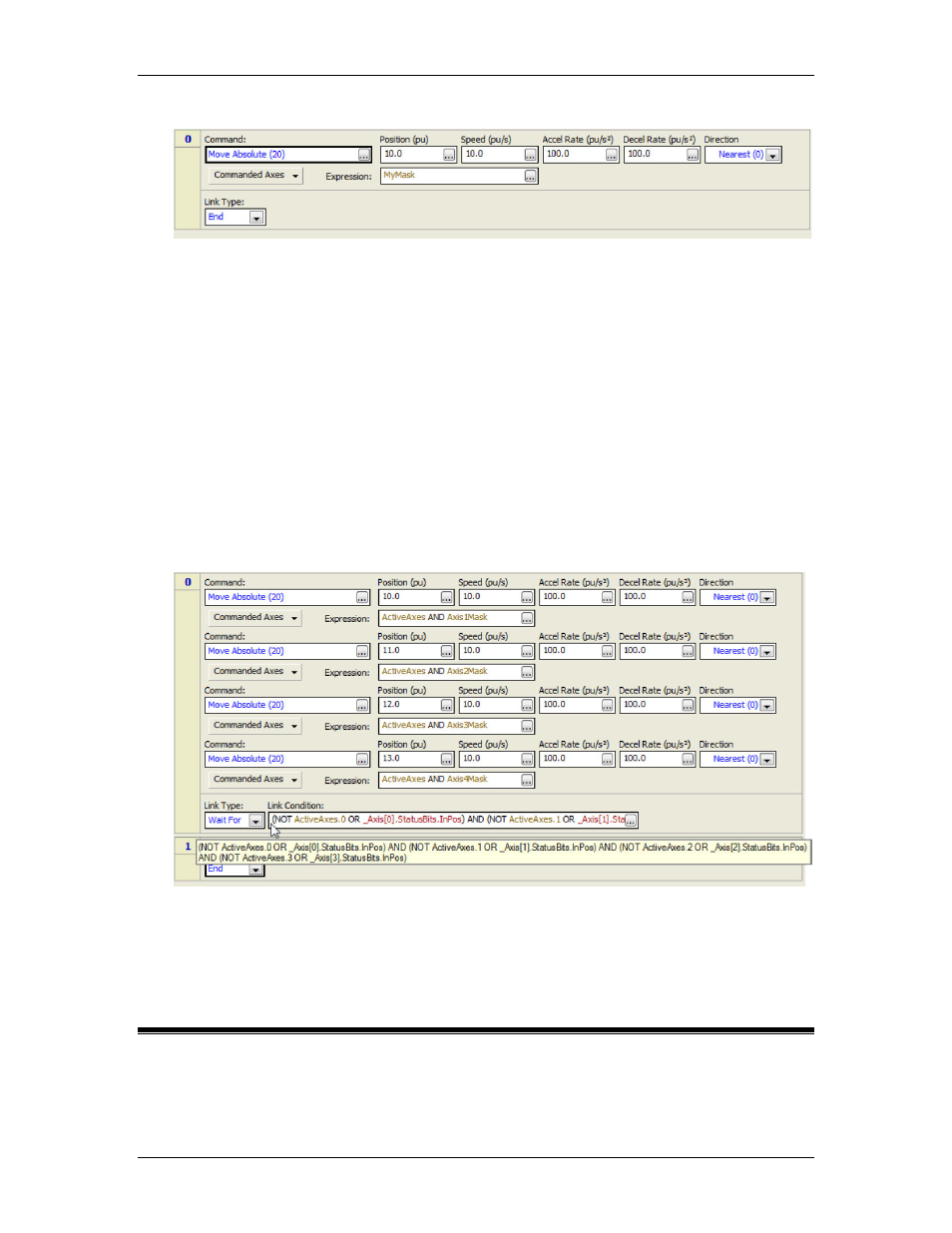
Example 2: One Command to Each Axis
This example demonstrates one method of programmatically removing one or more axes
when sending a set of commands to a set of axes.
1. The following variables are defined:
a. ActiveAxes: A DWORD that will be define which axes should receive
commands.
b. Axis1Mask, Axis2Mask, Axis3Mask, Axis4Mask: DWORD variables that will
be used as constants. Each of these variables is initialized to a value that has
the bit set for its respective axis. The values of these variables must always
remain the same.
2. This user program step has one Move Absolute (20) command for each axis. Since the
ActiveAxes variable is ANDed with the axis-specific AxisnMask variable, each command
can only be sent to the axis specified by the respective AxisnMask variable, and only if
the respective bit in the ActiveAxes variable is set.
3. The Wait For Link Condition waits for the In Position bit to turn on for only the
selected axes. The expression is too long to be viewed from the Link Condition box, but is
shown above in the tooltip window.
5.11.9. Link Types
5.11.9.1. Link Types Overview
312
Delta Computer Systems, Inc.