Velocity-pressure and velocity-force control, Pressure/force limit, Limit pressure or force – Delta RMC151 User Manual
Page 174: Pressure limit or force limit
RMC70/150 and RMCTools User Manual
The Pressure/Force Target Generator bits in the Status Bits register indicate which
portion of the move the axis is currently in. These bits are useful when programming
complex motion sequences.
Pressure/Force Target Generator Done bit
This bit indicates that the Target Pressure or Target Force has reached the Requested
Pressure/Force. If the ramp is interrupted, e.g. due to a halt, the done bit will not be
set because the commanded motion was not completed. Notice that this bit does not
indicate whether the Actual Pressure or Actual Force has reached the Requested
Pressure/Force.
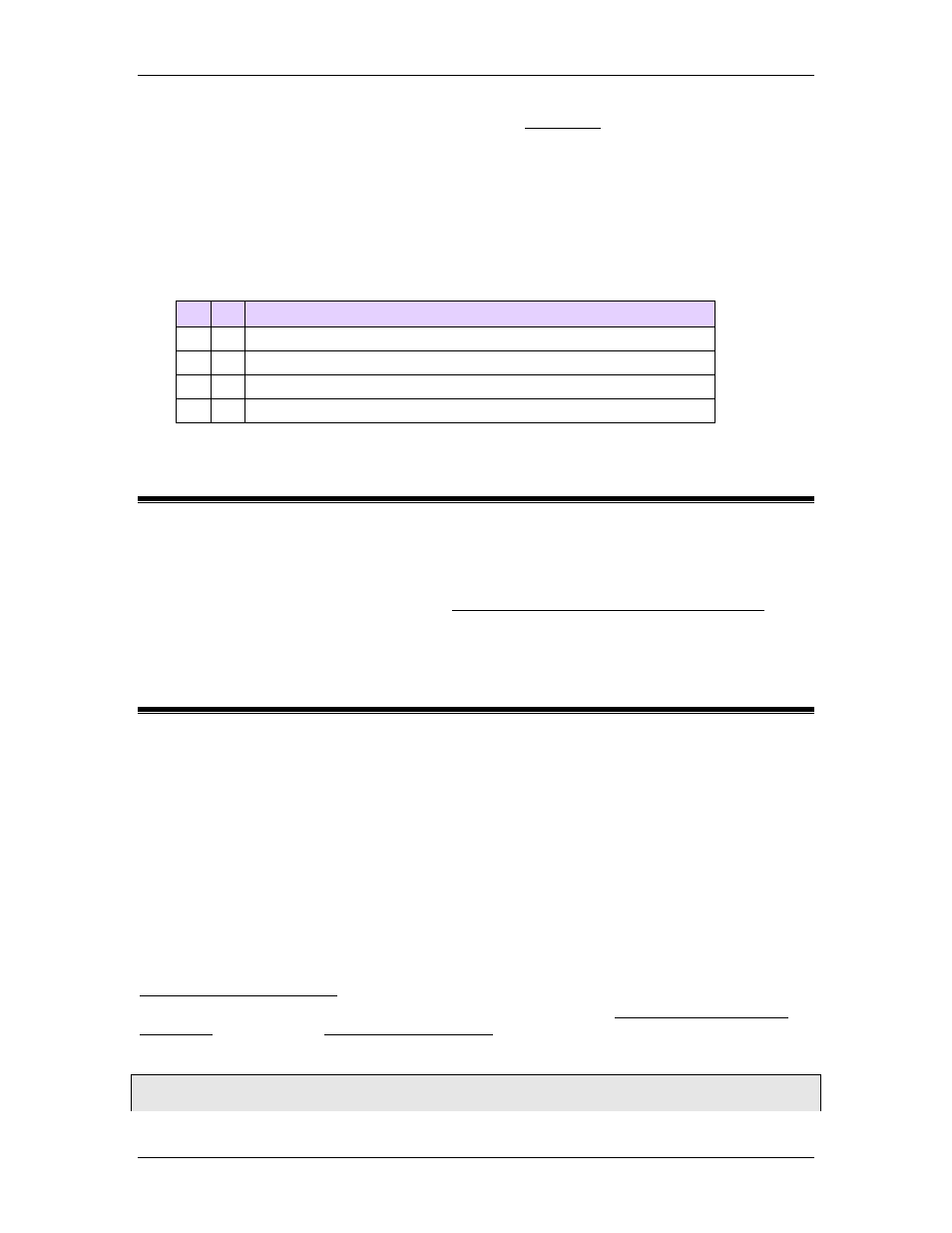
Pressure/Force Target Generator State A and B bits
B
A Description
0
0
The target generator is complete
0
1
Pressure/Force is accelerating
1
0
Constant
1
1
Pressure/Force is decelerating
3.7.4. Velocity-Pressure and Velocity-Force Control
The RMC supports velocity-pressure and velocity-force control. This means controlling both
velocity and pressure or force with a single actuator. For example, an injection molding press
may need to control the velocity of the injection, but also limit the force during the motion.
Setting up, tuning and performing velocity-pressure or velocity-force is virtually identical to
position-pressure or position-force. See the Position-Pressure and Position-Force Control for
details and procedures.
3.7.5. Pressure/Force Limit
Pressure limit or force limit is a special type of pressure or force control, typically used on
position-pressure of position-force axes. Pressure/Force Limit limits the Actual Pressure or
Force during position or velocity motion. Pressure/Force Limit is useful in applications that
require moving to a position while not exceeding a certain pressure or force during the move.
For example, consider a vehicle manufacturing application that presses a bearing into a
steering knuckle. The bearing must be pressed to a final position, but the force during the
move cannot exceed a certain value. Force limit is an excellent way to ensure that the move
occurs as quickly as possible without damaging the bearing due to excessive force.
You can choose to apply Pressure/Force Limit in the positive or negative directions, or both.
The Target Pressure/Force (or the negated Target Pressure/Force for the negative direction) is
the value at which the Actual Pressure or Force will be limited. The axis position or velocity
can be controlled normally as long as the Actual Pressure or Force does not approach the limit.
As the Actual Pressure or Force approaches the threshold, the RMC will limit the motion so
that the pressure/force limit is not exceeded. For more advanced details, see the
Pressure/Force Limit Details topic.
Pressure/Force Limit cannot be used in Direct Output. To issue the Set Pressure/Force Limit
Mode (40) command, the Direct Output Status bit must be off. To turn off the Direct Output
Status bit, put the axis in Open Loop or Closed Loop control.
Note:
Pressure Limit mode may affect motion even when the Actual Pressure is well below the
154
Delta Computer Systems, Inc.