Delta RMC151 User Manual
Page 124
RMC70/150 and RMCTools User Manual
command parameter is treated as a position on a linear axis; the axis begins
moving toward the position as if on a linear scale. If the position is outside of the
valid position range, the axis rotates through the number of revolutions required to
reach the position. Each time the Target Position wraps during the move, the
Position Unwind value is subtracted from the Command Position until the Command
Position is within the valid position range.
Relative point-to-point moves can also be used to move the axis through multiple
rotations. See the Rotary Motion with Relative Point-to-Point Moves section below.
Example:
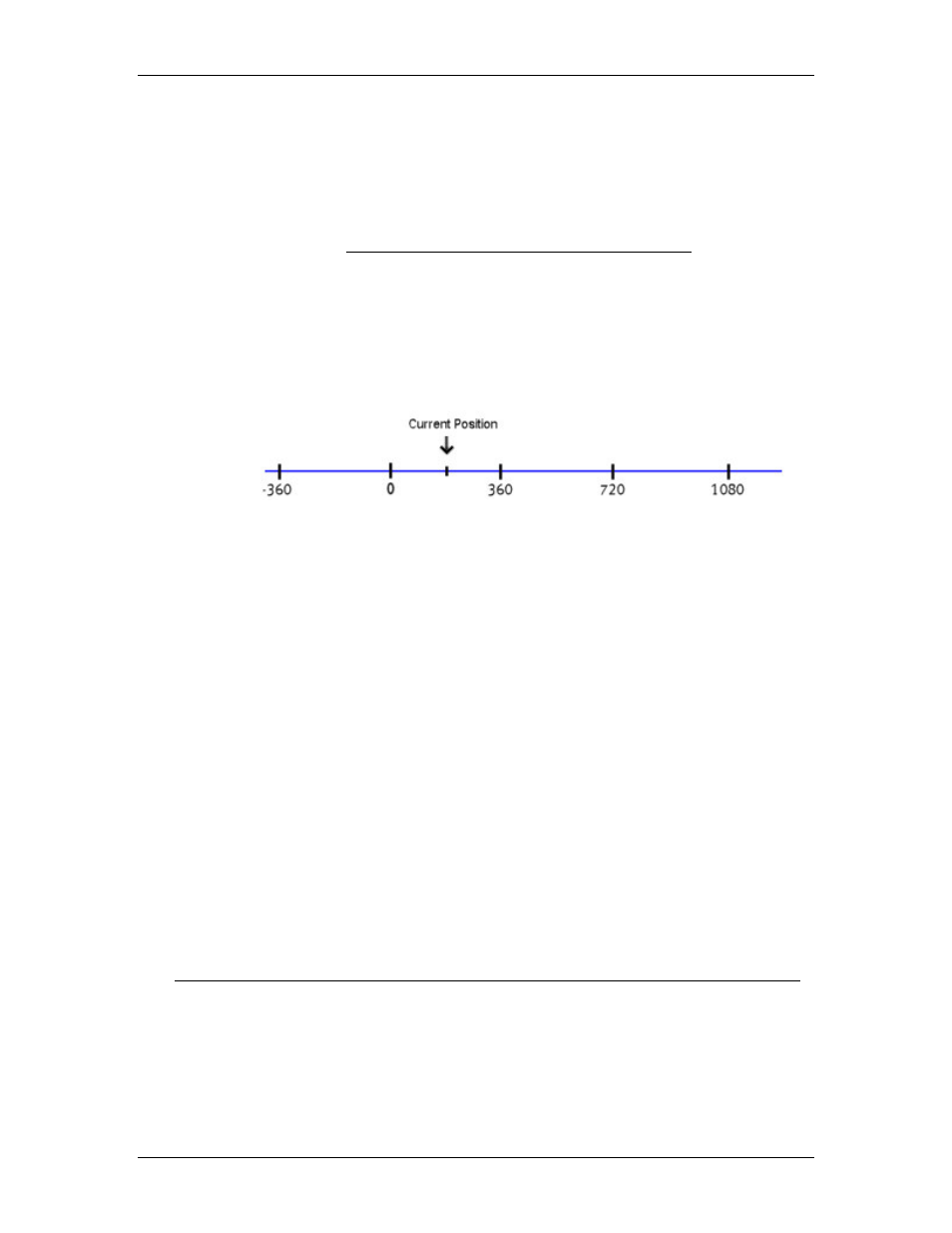
For example, consider a rotary axis with a Position Unwind of 360 where the
Actual Position is at 180. When a Move command is issued with the Absolute
Direction parameter, the Move command considers the axis as if it were
linear, as shown below. Each labeled mark on the axis represents one
revolution. Therefore, moving to 720 would move the axis 1.5 revolutions.
Notice that when it reaches the final position, the Command Position will be
0, not 720, because it subtracted 360 each time it wrapped.
•
Current:
This option will move to the Requested Position in the current direction. The current
direction is determined by current velocity of the axis. If the axis is already in
closed-loop control, the Target Velocity is used. If the axis was in open-loop control
when the command was issued, then the Actual Velocity will be used. If the axis’s
current velocity is zero when the command is issued, it will behave as the Nearest
direction parameter option.
If the Requested Position command parameter is outside the valid range of the axis,
the Command Position will be set within the valid range using modulo arithmetic
such that the position will be the same location within the range. For example, if the
valid range is 0-360 (not including 360), and the Requested Position is 800, the
Command Position will be set to 80 (800 mod 360). Likewise, with a Requested
Position of -100, the Command Position will be set to 260 (360 + (-100 mod 360)).
The Command Position will never be more than 1 revolution from the current Target
Position.
Rotary Absolute Motion Examples
Example 1: Basic Rotary Move
Consider a rotary axis with a single-turn encoder with a Position Unwind value of 360
and a Position Offset of 0. Therefore, the position range extends from 0 up to, but not
including, 360. Assume the current position of the axis is 45. You issue a Move Absolute
command with a Position command parameter of 135. The following illustrations explain
how the axis will behave for each possible Direction parameter:
Positive
Negative
The axis will move in the positive
direction to the Command Position, as
shown below:
The axis will move in the negative
direction to the Command Position, as
shown below:
104
Delta Computer Systems, Inc.