Delta RMC151 User Manual
Page 115
3 Controller Features
•
Pneumatics
Due to the compressibility of air, pneumatic systems are notorious for oscillating. The
active damping limits the oscillation, resulting in much better control.
•
Small Hydraulic Cylinders with Large Loads
In hydraulic cylinders with a large mass and a relatively small bore, the effects of the
compressibility of the oil are the most pronounced, and can result in oscillation. Active
damping limits the oscillation, resulting in much better control. In certain cases, the
use of active damping can decrease the bore of the cylinder required, which can also
reduce the size of the hydraulic power unit.
Deciding whether a System Needs Active Damping
To determine whether a system needs active damping, give it an open loop Control
Output. If the system oscillates, especially after the initial start of motion, it could benefit
from active damping.
Active Damping Options
Active damping requires information on the accelerations or forces acting on the system.
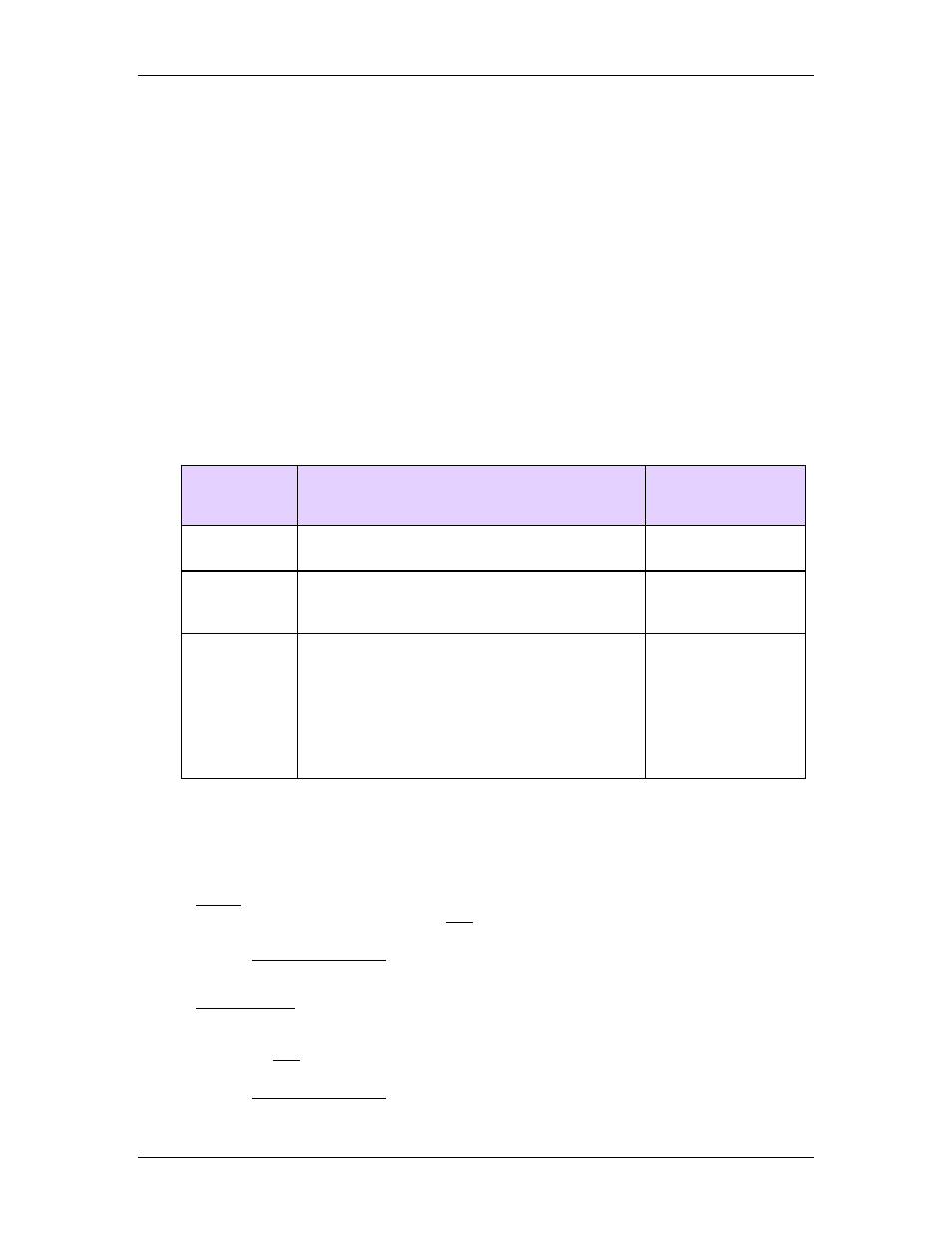
This information can be obtained in a variety of ways. The table below lists the options
available. Typically, using accelerometers or force feedback provides the best control.
Position-based acceleration does not provide as good control.
Active
Damping
Type
Possible Sources
Required Axis Type
Force
Secondary Force Input (single- or dual-input)
Position-Force* or
Velocity-Force*
Acceleration
Input
Secondary Acceleration Input (single- or dual-
input)
Position-Acceleration
or
Velocity-Acceleration
Position-based
or or Velocity-
based
Acceleration
Position or Velocity Input (uses the Actual
Acceleration of the feedback)
•
Unfiltered Acceleration (not
recommended)
•
Filtered Acceleration (not
recommended)
•
Modeled Acceleration
Position or Velocity
*In rare cases, Active Damping with pressure feedback is possible on a position-pressure
or velocity-pressure axis, requiring a secondary pressure input, but is generally not
recommended.
Setting Up Active Damping
Pressure or Force Input
a. Define a position-pressure or position-force axis. On the RMC70, this secondary
pressure or force input requires an AP2 module. On the RMC150, the CPU must have
the pressure control option, designated as RMC151.
b. Set the High-Order Control parameter to Active Damping.
Acceleration Input
a. Define an axis with a secondary acceleration input. If you are using one
accelerometer, choose Accel (single-input). If you are using two accelerometers,
choose Accel (dual-input, diff.). On the RMC70, the secondary acceleration input(s)
require an AP2 module. On the RMC150, the CPU must have the pressure control
option, designated as RMC151.
b. Set the High-Order Control parameter to Active Damping.
deltamotion.com
95