Delta RMC101 User Manual
Delta motion control protocol (dmcp) user guide
DMCP User Guide
Page 1 of 9
October 23, 2001
Delta Motion Control Protocol (DMCP)
User Guide
Why Another Protocol?
The RMC supports many application protocols; most were designed by other automation
companies. However, when Delta Computer Systems, Inc. needed to choose a protocol
to use for its own software, such as the RMCENET ActiveX Control, to communicate
with the RMC, it found that none of these protocols satisfied this simple list of
requirements:
1. It must have binary, little-Endian, word-aligned encoding.
2. It must have low data and processing overhead.
3. It must be flexible enough to allow addressing of a minimum of 65,536 16-bit
registers.
4. It must be non-connection based to support both UDP and TCP operating modes.
Therefore, Delta designed yet another application protocol, called Delta Motion Control
Protocol (DMCP).
DMCP versus Modbus/TCP
Users who want to control or monitor the RMC through TCP or UDP must select one of
the protocols the RMC supports. Delta recommends two of these protocols: DMCP and
Modbus/TCP. All other protocols supported by the RMC are either difficult to get
information on, complicated, or inefficient. We will now compare DMCP and
Modbus/TCP.
DMCP was designed by Delta Computer Systems for its own products and is not
implemented by other manufacturers. Modbus/TCP is an open protocol maintained by
Schneider Electric and implemented by many manufacturers; this is the main advantage
of Modbus/TCP.
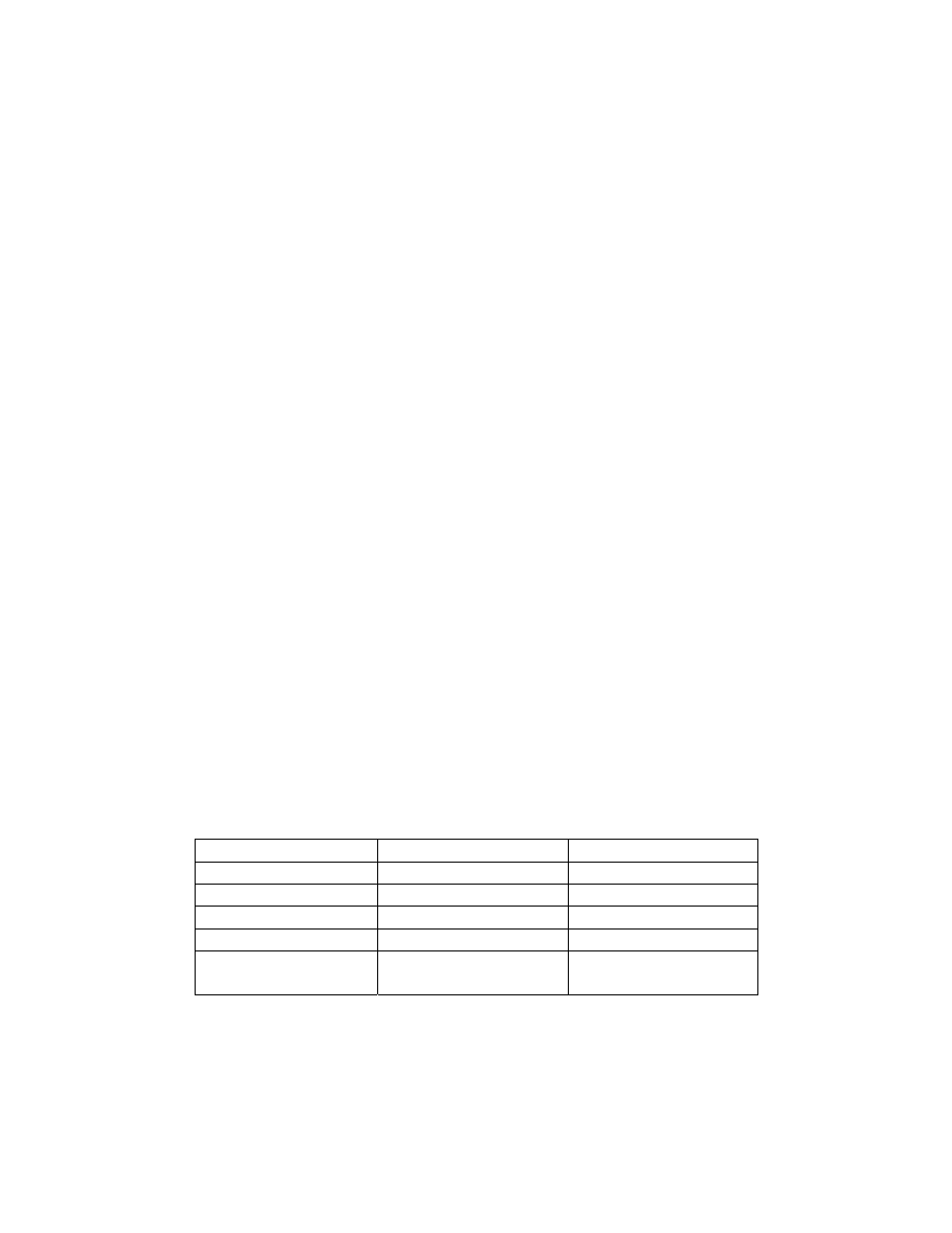
The following chart compares the technical specifications of these two protocols:
Characteristics DMCP
Modbus/TCP
Transport Protocols TCP, UDP
TCP
Byte Order
Big or Little Endian
Big Endian (Motorola)
Data Alignment
16-bit 8-bit
Static Header Size
7 bytes
8 bytes
Maximum 16-bit
Registers per Packet
TCP: 2048
UDP: 512
Read: 125
Write: 100