Loop time – Delta RMC151 User Manual
Page 71
3 Controller Features
see the base version, plus a single-letter Configuration ID, as in ”3.30.0A”. The following
chart shows the currently-used Configuration IDs:
ID
RMC70
RMC150
A
RMC75S, revision 2.1C or older
RMC150E/RMC151E
B
RMC75P, revision 2.1D or older
C
RMC75E, revision 1.1G or newer
D
RMC75S, revision 2.1D or older
RMC75P, revision 2.1E or older
E
RMC75E, revision 1.1F or older
Special Releases
In some cases, Delta will release firmware that differs in some way from the generally-
released firmware. These are designated by an additional special release code. For
example, the ”S4” special firmware has ”S4” append to the version number, as in ”2.72A-
S4”. For more information on the S4 special firmware in particular, see the Firmware
Compatibility section below.
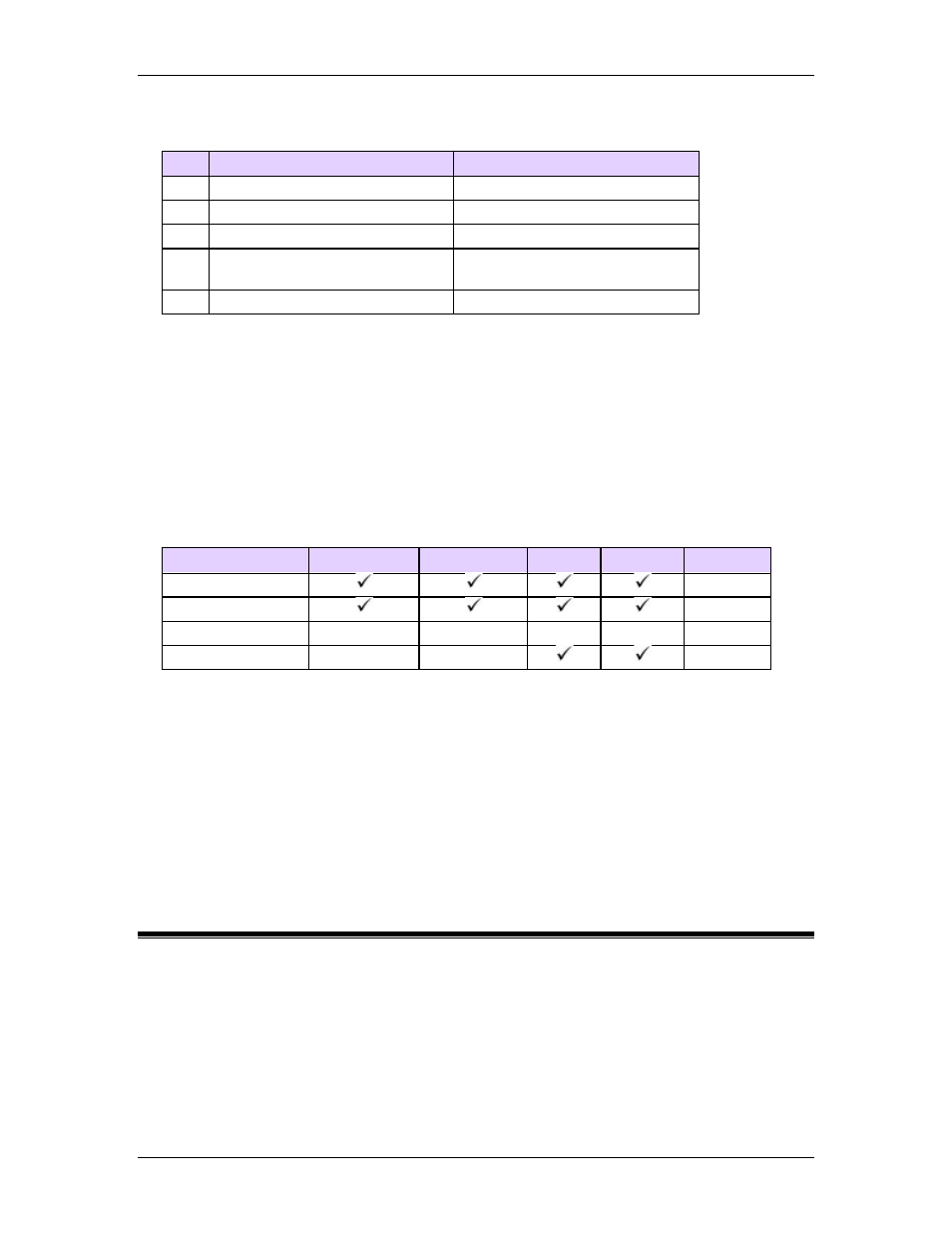
Firmware and Hardware Compatibility
Notice that not all firmware releases support all hardware configurations. The RMC150
firmware currently supports all revisions of RMC150 hardware, although individual
modules may not be supported until later releases. However, the RMC70 firmware does
have some hardware compatibility limitations:
Version
RMC75S
RMC75P
RMC75E RMC150E Notes
1.00 to 2.21
2.30 to 2.71
See Note 1
2.72-S4 to 2.99-S4 2.1C or older 2.1D or older
-
-
See Note 2
3.00 and above
2.1D or newer 2.1E or newer
See Note 3
Note 1: These firmware releases support all RMC70 controllers, however, new commands
added by these releases are not included in firmware for older RMC75S and RMC75P
controllers (Configuration IDs A and B).
Note 2: These firmware releases are reserved for patch releases for the older RMC75S
and RMC75P controllers (Configuration IDs A and B), which cannot support new features
and are therefore not included in the 3.00 and later releases. This firmware is assigned
the ”S4” special release code.
Note 3: These firmware releases no longer support older RMC75S and RMC75P
controllers (Configuration IDs A and B), which cannot support new features.
3.2.2. Loop Time
The RMC is a deterministic controller. It reads the inputs, computes the control algorithms and
updates the outputs at a specific interval. This interval is called the controller loop time, in
reference to the way the controller repeatedly "loops" through its code.
The RMC will always run at its loop time setting. When it finishes all the calculations for one
loop, it waits until the next loop time before doing its calculations again.
Setting the Loop Time
To set the loop time of the RMC, use the Control Loop Time Settings Page.
deltamotion.com
51