Rotary motion with relative position moves, Rotary motion with velocity and gear moves, Rotary motion with open loop commands – Delta RMC151 User Manual
Page 127
3 Controller Features
Rotary Motion with Relative Position Moves
This section applies to the following commands:
•
•
•
•
•
Advanced Time Move Relative (27)
•
These commands are useful for moving the axis through multiple rotations.
Each of the above commands has a command parameter called Displacement. Each
command works by moving the axis by the requested Displacement relative to the
selected value of Command Position, Target Position, or Actual Position. If the Command
or Target Position is selected, and the axis is currently in a mode that does not use that
Position (such as open loop) it will be relative to the current Actual Position. The sign of
the Displacement specifies the direction of movement. The Displacement can be greater
then the Position Unwind, which makes these commands useful for moving the axis
through multiple rotations. The Command Position is initially set to the current selected
relative-to position plus the requested Displacement. Each time the position wraps, the
Position Unwind is subtracted from the Command Position until it reaches the final
position.
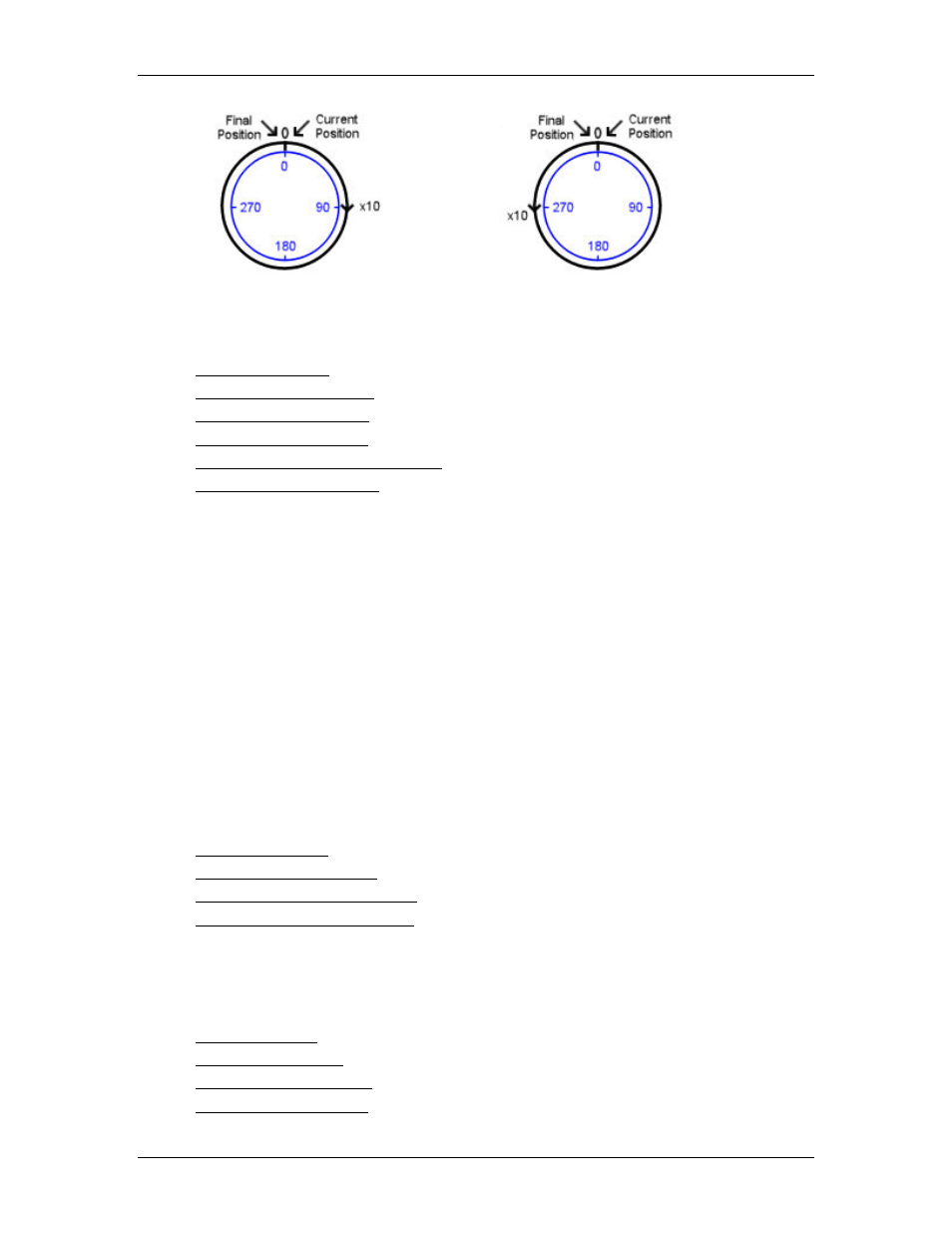
For example, consider an axis with a Position Unwind of 1.0. Therefore, the position range
extends from 0 up to, but not including, 1.0. If the current Command Position is at 0.0
and a Move Relative command is issued with a Displacement of 100 relative to the
Command Position, the axis will rotate 100 revolutions and end up at 0.0.
Rotary Motion with Velocity and Gear Moves
This section applies to the following commands:
•
•
•
Gear Pos (Clutch by Time) (30)
•
Gear Vel (Clutch by Time) (31)
These commands work like on a linear axis, except that the positions will wrap as usual
for a rotary axis.
Rotary Motion with Open Loop Commands
This section applies to the following commands:
•
•
•
•
deltamotion.com
107