Delta RMC151 User Manual
Page 752
RMC70/150 and RMCTools User Manual
5 Jerk Rate (position-units/s
3
)
Any REAL number
Description
This command electronically gears the axis to the requested register, using this register
as the master position. Typically, the master register is the Target or Actual Position of
another axis. The slave ramps its target velocity using the Acceleration Rate and Jerk
Rate (rate of change of acceleration) parameters until it reaches the synchronized gear
ratio. The gear ratio is determined by the Numerator and Denominator.
This command is more robust than Gear Pos (Clutch by Time) (30) in that it avoids slave
velocity discontinuities if the initial master velocity is low.
See the Gearing Overview topic for general information about gearing, including Gear
Ratio, Clutching and possible Gear Masters.
Gear Position (Clutch by Rate) Example
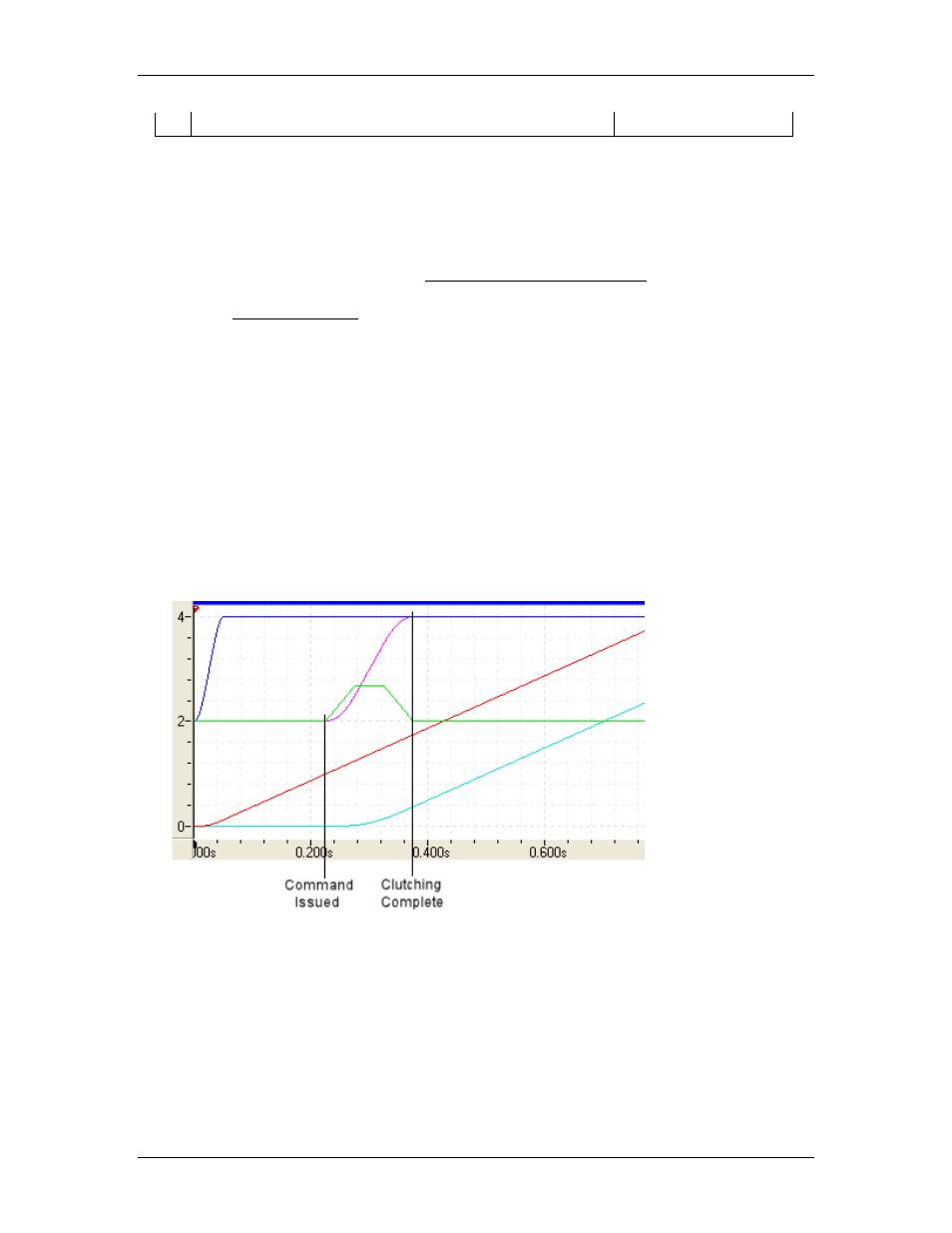
In this example, Axis 1 (slave) gears to Axis 0 (master) at a 1:1 ratio. The master starts
moving at time 0. When the master reaches 1 pu, the following Gear Pos (Clutch by
Time) command is issued to the slave.
Numerator = 1
Denominator = 1
Master Register = _Axis[0].TarPos
Accel Rate = 50
Jerk Rate = 1000
The plot below shows how the slave moves.
Legend:
— Master Position
— Master Velocity
— Slave Acceleration
—
Slave Position
— Slave Velocity
When the command was issued to the slave, it began ramping up the velocity at the
specified Acceleration and Jerk. As the slave approaches the master, the velocity is
ramped down. The clutching is complete when the slave reaches the specified gear ratio.
Applications Not Suitable for Clutch by Rate:
The Gear Position (Clutch by Rate) command clutches based on a rate, which means it
ramps its target velocity using the acceleration and jerk parameters until it reaches the
synchronized gear ratio. This differs from clutching by distance, in which the axis would
reach the requested gear ratio in a certain distance of travel.
Clutching by rate is not the best method of gearing for applications that require axes to
be geared at a specified ratio by a certain distance, such as flying cut-offs, etc. Use the
732
Delta Computer Systems, Inc.