Delta RMC151 User Manual
Page 403
5 Programming
d. The fourth condition will continuously monitor the discrete input (or variable
register) for moving the axis backward. When it turns "off", it will start User
Program 3, which will stop the axis.
Example 1: Using a "button" on an HMI
The example will follow the method described above.
1. Set up the buttons
First, the user sets up two momentary buttons on the HMI, called Jog Forward and
Jog Back. As with most HMIs, this momentary button can only write to a bit. The
RMC supports writing to bits with the Allen-Bradley DF1 protocol or Modbus/RTU or
Modbus/TCP. This examples shows using DF1. The momentary button writes a "1"
when it is pressed, and a "0" when it is released.
The user programs the Jog Forward button in the HMI to write to bit zero in the
RMC variable 0 (address F56:0/0). In the RMC, the user named this variable
Jog_Forward and defined it as a DINT (double integer).
The user also programs Jog Back button in the HMI is programmed to write to bit
zero in the RMC variable 1 (address F56:1/0). In the RMC, the user named this
variable Jog_Back, and defined it as a DINT type (double integer).
It is very important that these variables be declared as DINT type, because later the
user will use the value of the entire register. If it were a REAL (floating point), it
would be unknown what value it would take on if bit 0 were changed.
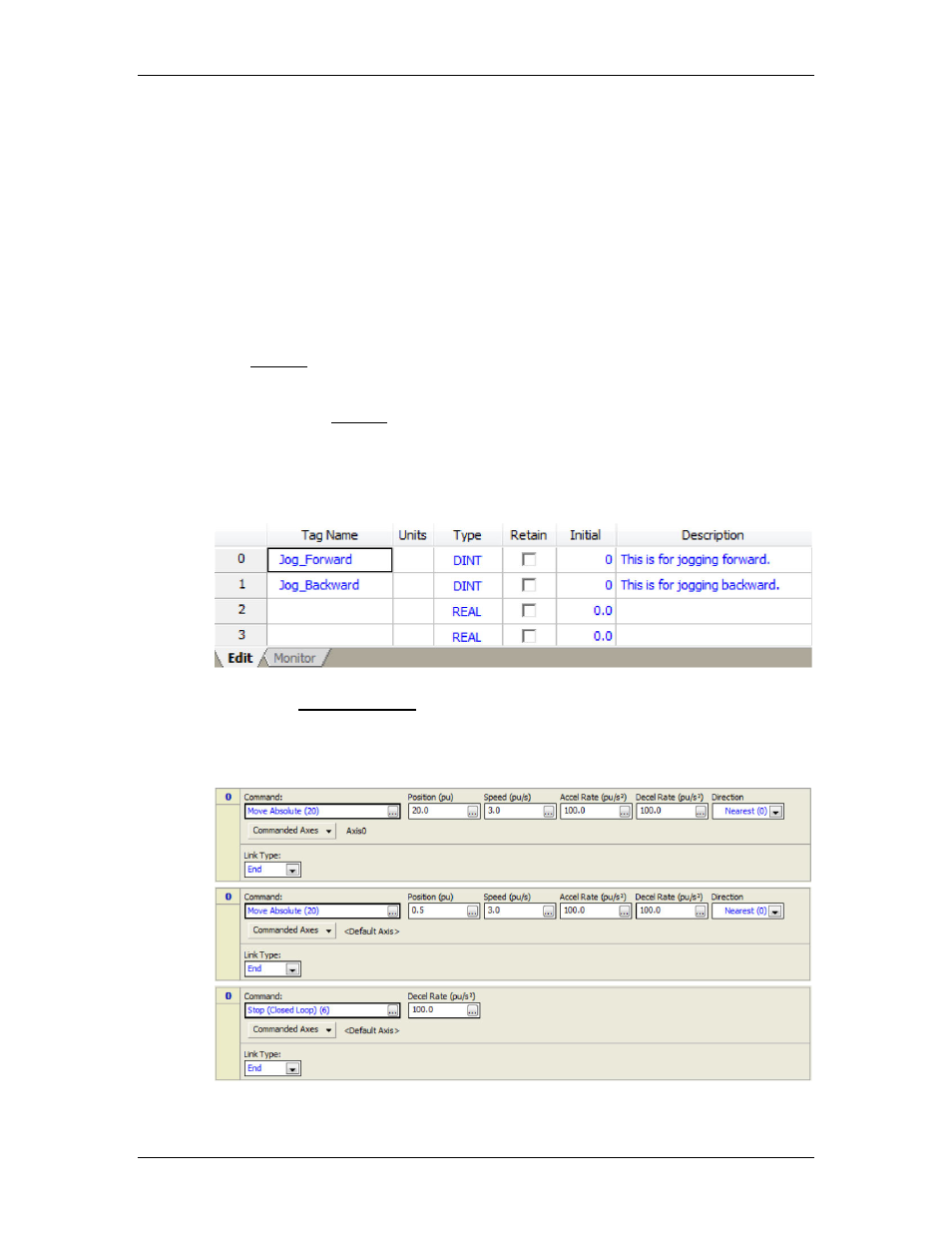
After the user has done this, the variable table looks like this:
2. Create three User Programs
The user created three programs. The speeds and accels were chosen based on the
system to be controlled. The user chose positions that are shortly before the end of
the stroke, so if the operator does not release the button, the axis will still stop
before hitting the end.
deltamotion.com
383