Velocity i-pd – Delta RMC151 User Manual
Page 113
3 Controller Features
Tuning Overview topic for details. Keep in mind that the I-PD algorithm does not use the
Velocity or Acceleration Feed Forwards.
You can also use the Tuning Wizard to tune I-PD control. However, if the gains are set to
ratioed, the Velocity Feed Forwards are used in I-PD only to determine the ratio of the
gains.
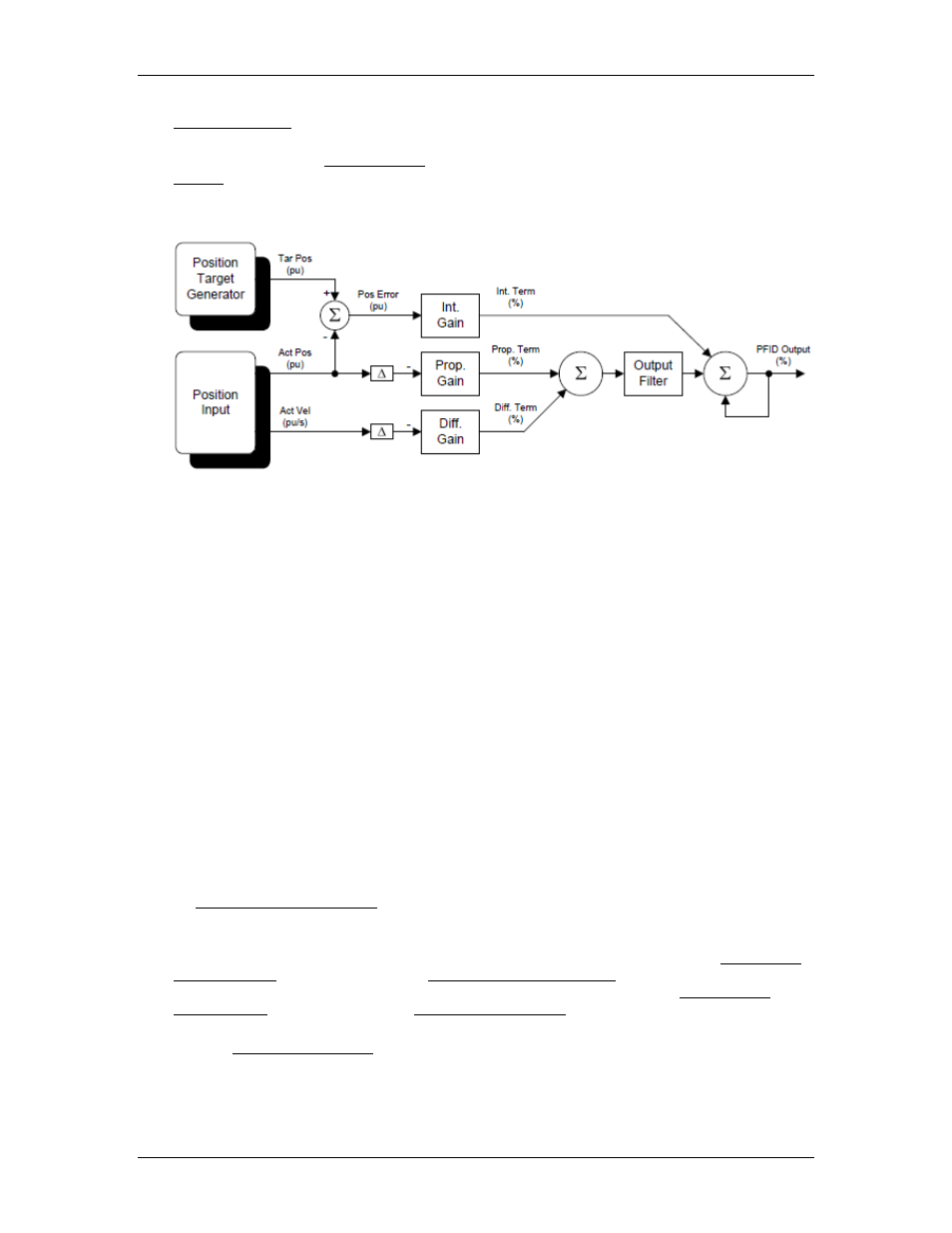
Diagram
3.5.12.2. Velocity I-PD
Velocity I-PD is an algorithm that can be used to perform closed-loop velocity control on a
velocity axis. I-PD stands for the central gains used in this mode: Proportional, Integral, and
Differential. The "-" indicates how the algorithm uses these gains.
For most velocity applications, the Velocity PID is more suitable than the Velocity I-PD. The
Velocity I-PD does not respond as quickly and does not use Feed Forwards. Therefore, it will
always lag behind the Target Velocity when it changes. It is easier to tune for no overshooting
and can handle step jumps better than the velocity PID.
Velocity I-PD Advantages
•
Excellent for controlling an axis that follows an irregular signal, such as a reference
signals that jumps, or a joystick.
Velocity I-PD Disadvantages
•
Lags behind the Target Velocity.
Motion Commands in Velocity I-PD Mode
The following commands are designed for use only with Velocity I-PD and automatically
put the axis into the Velocity I-PD control mode during the commanded motion:
•
This command immediately sets the Target Velocity to the requested velocity. It does
step-jump; it does not ramp it.
To use the Velocity I-PD control mode with other motion commands, use the Set Pos/Vel
Ctrl Mode (68) command to set the Next Pos/Vel Control Mode to Vel I-PD. The next
closed-loop motion command will use the control mode specified in the Next Pos/Vel
Control Mode status register. The Current Control Mode register indicates the mode
currently in use.
See the Closed Loop Control topic for details on which commands are supported in
Velocity I-PD control.
Algorithm
deltamotion.com
93