Delta RMC151 User Manual
Page 404
RMC70/150 and RMCTools User Manual
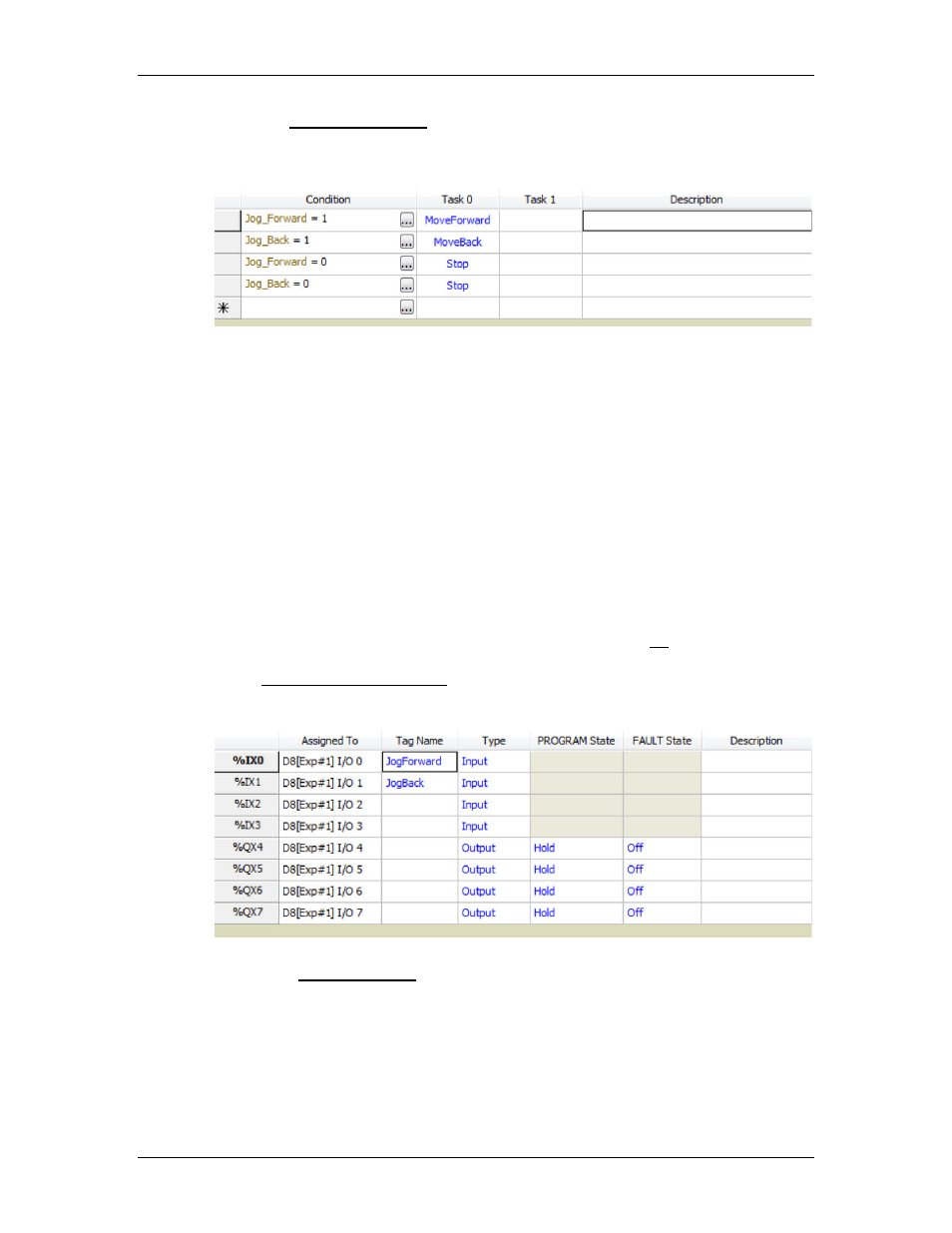
3. Create four Program Triggers conditions:
Since the HMI writes to bit 0 of the variables, the value of the entire variable will be
either zero or one. Therefore, the user made the Program Trigger conditions
compare the entire variables to zero or one.
Now, when the operator presses and holds the Jog Forward button on the HMI, it will
write a 1 to bit 0 of the Jog_Forward variable. The Program Trigger sees that the
Jog_Forward variable became 1, so it starts the User Program MoveForward. When
the operator releases the Jog Forward button on the HMI, it will write a 0 to bit 0 of the
Jog_Forward variable. The Program Trigger sees that the Jog_Forward variable
became 0, so it starts the User Program Stop.
The Jog Back button works like the Jog Forward button.
Example 2: Using a button or joystick with a discrete input
The user chooses to use a 3-position switch. When it is pushed to the right, one output
goes high. When it is pushed to the left, the other output goes high. When it's in the
middle, both outputs are low.
1. Set up the discrete inputs
The user wires the two outputs from the switch to discrete inputs on the RMC. In
this example, the user chooses inputs 0 and 1 on the RMC70 D8 expansion module.
Any general inputs on the RMC70 or RMC150 will work.
In the Discrete I/O Configuration dialog, the user defines discrete I/O points 0 and
1 as inputs and calls them Jog_Forward and Jog_Back.
After the user has done this, the Discrete I/O Configuration looks like this:
2. Create three User Programs
The user created three programs. The speeds and accels were chosen based on the
system to be controlled. The user chose positions that are shortly before the end of
the stroke, so if the operator does not release the button, the axis will still stop
before hitting the end.
384
Delta Computer Systems, Inc.