Command: hold current position (5), Hold current position (5), A hold current position (5) – Delta RMC151 User Manual
Page 718
RMC70/150 and RMCTools User Manual
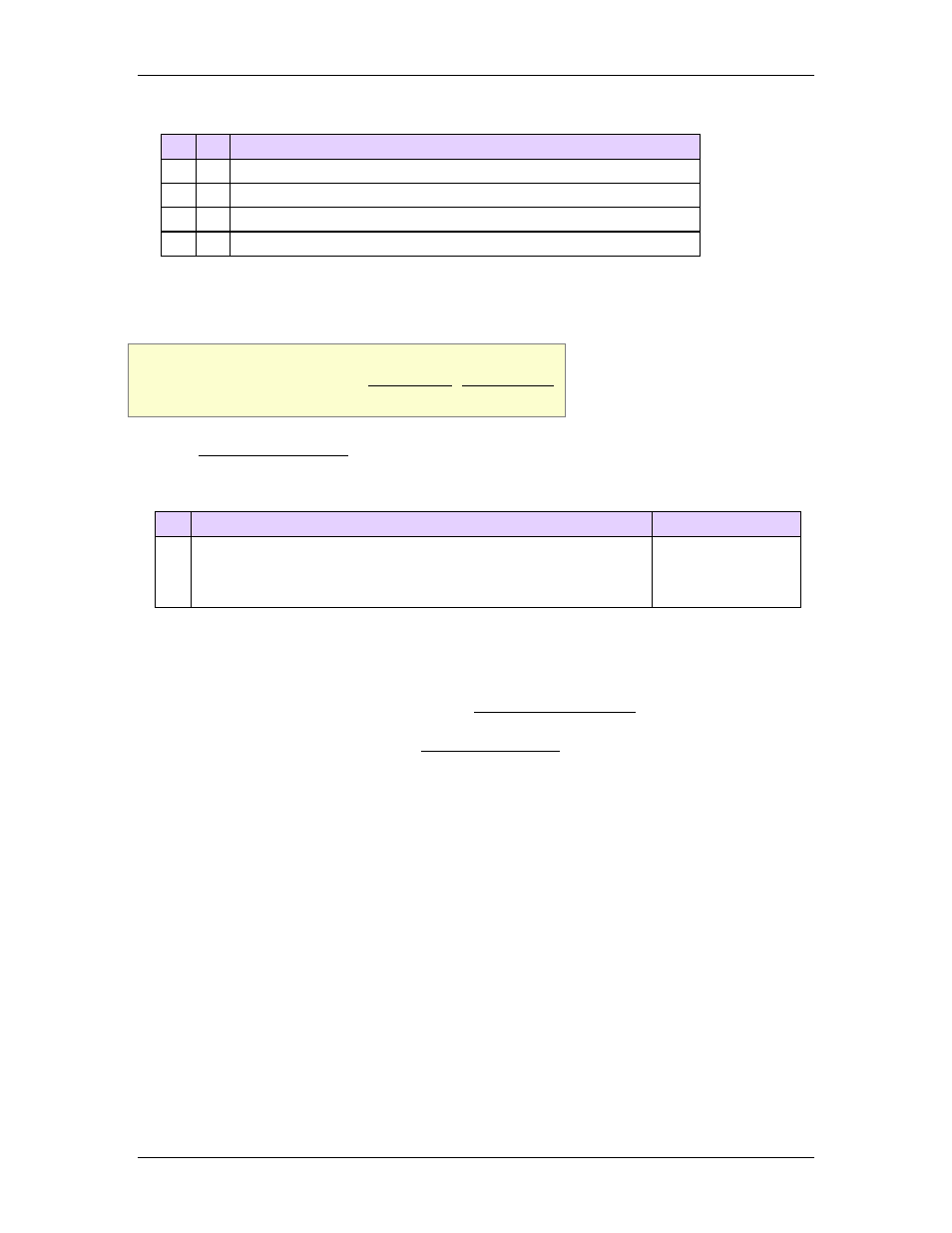
Target Generator State A and B bits
B
A Description
0
0
The open loop stop is complete
0
1
reserved
1
0
reserved
1
1
Ramping Control Output toward 0 volts
8.4.2.3. Command: Hold Current Position (5)
Supported Axes: Position Control Axes
Supported Control Modes: Position PID, Position I-PD
Firmware Requirement: 1.00 or newer
See the Commands Overview topic for basic command information and how to send
commands from PLCs, HMIs, etc.
Command Parameters
# Parameter Description
Range
1 Control Behavior
•
Standard (0)
•
Reset (1)
a valid integer as
described
Description
This command switches the axis to closed loop, unless it already is, and sets the Target
and Command Positions equal to the Actual Position, and holds the current position. No
ramping is done on the Target Position. If the axis is moving, this command will stop it
suddenly. To slowly stop the axis, use the Stop (Closed Loop) (6) command instead.
It is not necessary to send this command after a closed loop command that will already
hold the final position, such as the Move Absolute (20) command. Doing so will actually
cause the axis to hold the current actual position, which is likely different from the initial
commanded position.
The In Position Status bit is valid with this command.
Control Behavior
The Control Behavior parameter determines the way that the control mode is affected
by this command. This parameter can have the following values:
•
Standard (0)
The controller will try to maintain the current control output, setting the integrator
or filtered output accordingly. This option is recommended for situations where you
want the Control Output to smoothly maintain it's value, such as transitioning from
pressure/force to position control while a significant amount of control output is
required to maintain position.
For hydraulic cylinder axes or motors in velocity mode, the Velocity Feed Forwards
must be set correctly in order for the Control Output to be smooth during the
control transition.
•
Reset (1)
698
Delta Computer Systems, Inc.