Delta RMC151 User Manual
Page 736
RMC70/150 and RMCTools User Manual
Special Notes
Actual Velocity and/or Actual Acceleration filtering may be required.
During the course of the Quick Move, the RMC calculates when it has to start decelerating
in order to reach the requested position. At that point, it switches into closed loop control.
When switching to closed loop control, the RMC uses the actual velocity and actual
acceleration to determine the target profile to the requested position. If the velocity
and/or acceleration feedback is noisy, the RMC may enter closed loop control to late,
causing the Target Position to overshoot the requested position, or the RMC may calculate
a very strange route to the requested position. If this occurs, you may need to adjust the
Actual Velocity Filter and/or Actual Acceleration Filter for that axis.
Status Bits
In Position Bit
When the Target Position reaches the Requested Position and the Actual Position is
within the In Position Tolerance window, the In Position Status bit will be set. This bit
indicates that the move is complete and the axis is at position.
Target Generator State Bits
The Target Generator bits in the Status Bits register indicate which portion of the move
the axis is currently in. These bits are useful when programming complex motion
sequences.
Target Generator Done bit
This bit indicates the move is complete, which occurs when the Target Position has
reached the Requested Position. Notice that this bit does not indicate whether the
Actual Position has reached the Command Position.
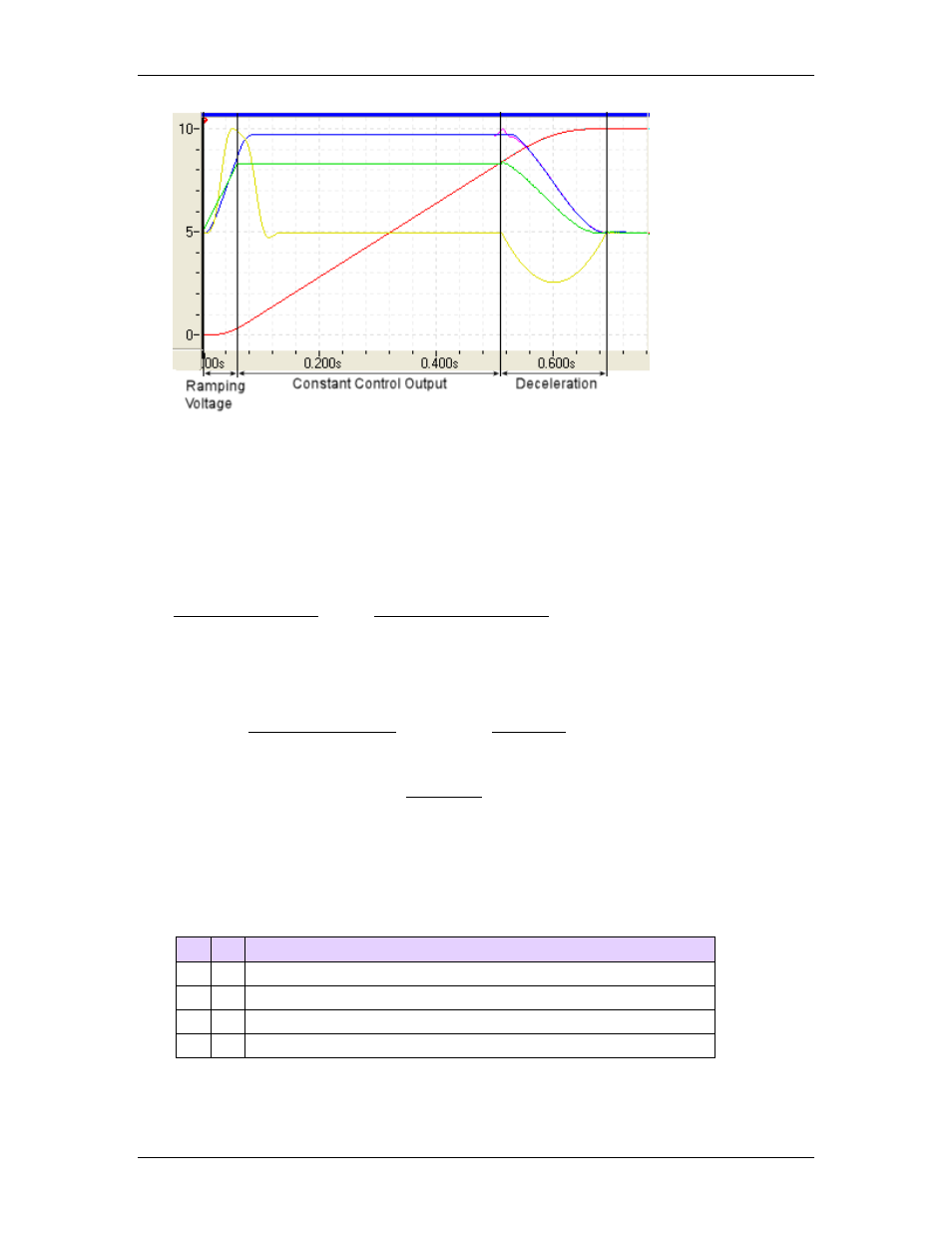
Target Generator State A and B bits
B
A Description
0
0
The target generator is complete
0
1
Ramping Control Output in Open Loop
1
0
Constant Control Output at Requested Output
1
1
Decelerating in Closed Loop
716
Delta Computer Systems, Inc.