Command: enter pressure/force control (rate) (46), Enter pressure/force control (rate) (46) – Delta RMC151 User Manual
Page 817
8 Command Reference
Pressure/Force Target Generator Done bit
This bit indicates that the Target Pressure or Target Force has reached the Requested
Pressure/Force. If the ramp is interrupted, e.g. due to a halt, the done bit will not be
set because the commanded motion was not completed. Notice that this bit does not
indicate whether the Actual Pressure or Actual Force has reached the Requested
Pressure/Force.
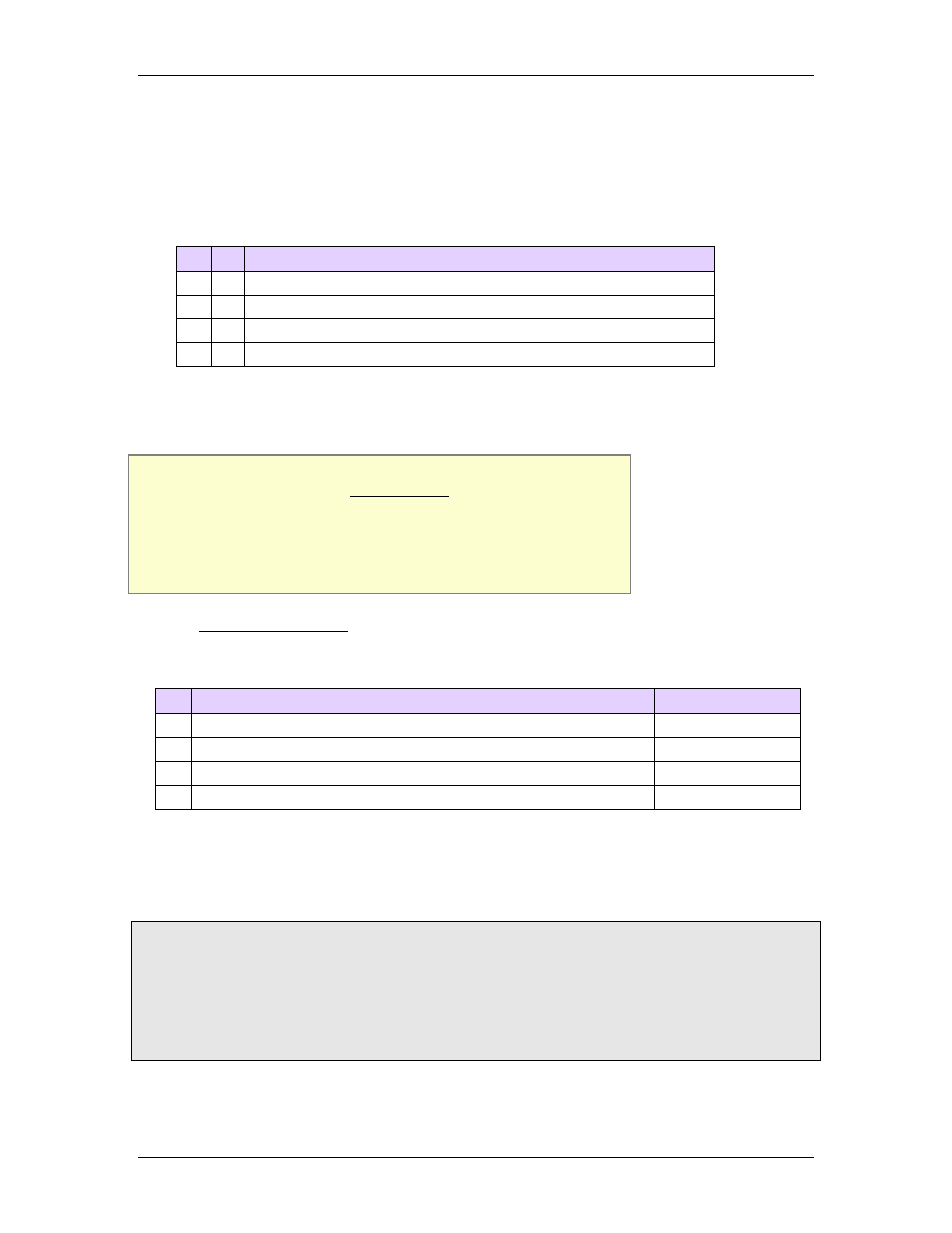
Pressure/Force Target Generator State A and B bits
B
A Description
0
0
Pressure/Force is stopped (done)
0
1
Pressure/Force is increasing
1
0
Reserved
1
1
Pressure/Force is decreasing
8.5.1.8. Command: Enter Pressure/Force Control (Rate) (46)
Supported Axes: Pressure/Force Control Axes
Firmware Requirement: 2.70 or newer
Hardware Limitations: RMC75S: versions 2.1D or newer only
RMC75P: versions 2.1E or newer only
RMC75E: No limitations
RMC150E: No limitations
See the Commands Overview topic for basic command information and how to issue
commands from PLCs, HMIs, etc.
Command Parameters
# Parameter Description
Range
1 Requested Pressure/Force (Pr or Fr)
any
2 Pressure/Force Rate (Pr/sec or Fr/sec)
≥ 0
3 Pressure/Force Accel Rate (Pr/sec
2
or Fr/sec
2
)
≥ 0
4 Integrator Preload (%)
-100% to 100%
Description
This command enters pressure or force control and then ramps to the Target
Pressure/Force to the Requested Pressure/Force at the rate specified by the
Pressure/Force Rate parameter. It will accelerate to that rate as specified by the
Pressure/Force Accel Rate.
Note:
This command will start with the actual pressure/force rate at the time the command is
issued, and bring it to the requested Pressure/Force Rate as specified by the Accel Rate.
Therefore, if the pressure/force is rising rapidly when this command is issued, the Target
Pressure/Force may overshoot the Requested Pressure/Force by a large amount. To
prevent overshoot, set the Requested Pressure/Force Accel Rate to a very large value, or
to zero for infinite acceleration. Or, use a different command for entering pressure/force
control.
deltamotion.com
797