Delta RMC151 User Manual
Page 754
RMC70/150 and RMCTools User Manual
If the master axis linear, this should be Nearest (0).
The other options will have no effect.
If the master axis is rotary, see the Rotary Motion
section below.
described
7
Slave Direction
If the slave axis linear, this must be Nearest (0). The
other options will have no effect.
If the slave axis is rotary, see the Rotary Motion
section below.
a valid integer as
described
Description
This command electronically gears the axis to the requested register such that the two
axes synchronize exactly at the requested Master Sync Position and Slave Sync
Position and then remain geared at the specified Final Gear Ratio. Typically, the
master register is the Target or Actual Position of another axis. This command is intended
for use in flying-cutoff and flying-shear type applications. This command will work even if
the speed of the master is changing.
See the Gearing Overview topic for general information about gearing, including Gear
Ratio, Clutching and possible Gear Masters.
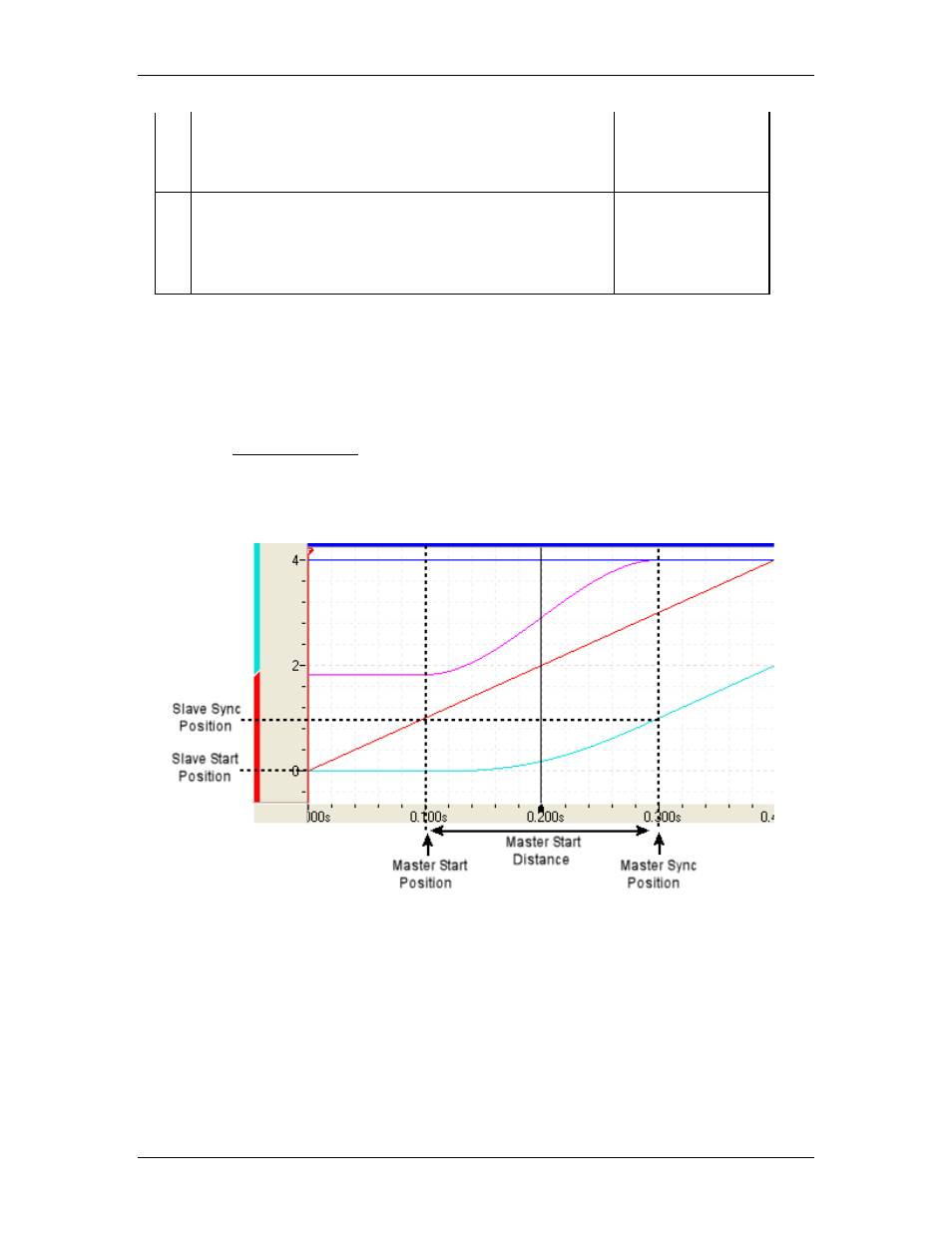
Definitions
The plot below is typical of a Gear Pos (Clutch by Distance) command. The table below
uses the plot to define some important concepts used in the remaining discussion.
Legend
—
Master
Position
— Slave
Position
— Slave
Velocity
—
Master
Velocity
The
master
positions
are
indicated
on the
x-axis
for
clarity,
although
the
positions
are
actually
on the
y-axis.
734
Delta Computer Systems, Inc.