Delta RMC151 User Manual
Page 289
4 Using RMCTools
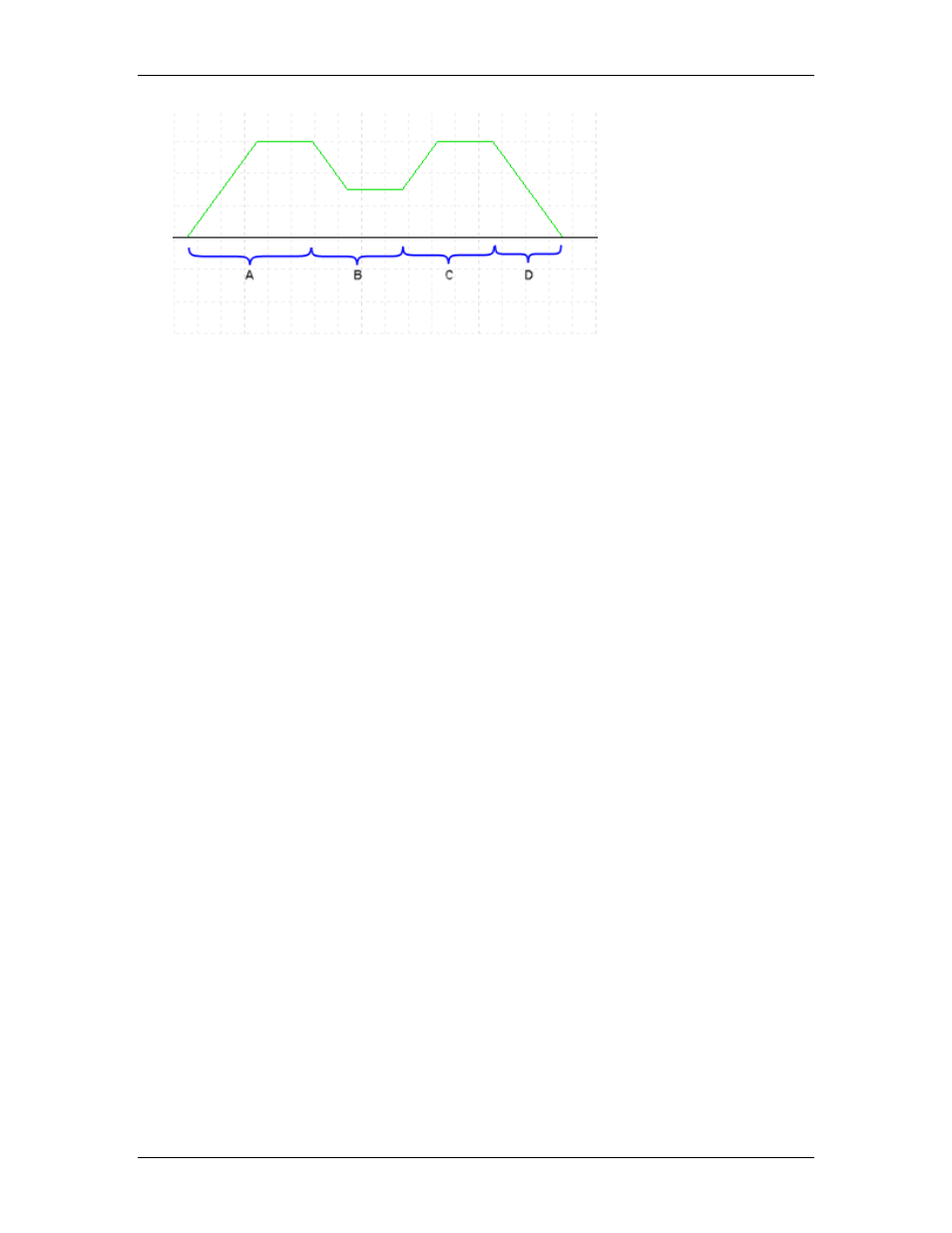
The parameters you enter on this page affect the Control Output profile as described
below:
Section A: The Control Output ramps up to the user-specified Output Voltage at the
specified Ramp Rate. The Control Output stays at that value until the axis stops
accelerating, at which point it goes to section B.
Section B: The Control Output ramps down to half of the user-specified Output
Voltage. The Control Output stays at that value until the axis stops accelerating, at
which point it goes to section C.
Section C: The Control Output ramps back up to the user-specified Output Voltage. The
Control Output stays at that value until the axis stops accelerating, at which point it goes
to section D.
Section D: The Control Output ramps down to zero.
Since the length of sections A, B and C depend on when the axis stops accelerating, the
time of this move profile will vary from system to system. Typically, it is less than 0.5
seconds. If the Actual Position gets too close to the specified End Position at any time
during the profile, the voltage will go to zero immediately.
Electro-servo Motor in Torque Mode
The Parameters
Maximum Distance: This specifies the maximum distance the axis is allowed to travel
during autotuning. If the Actual Position travels farther than this distance, a stop pulse
(see profile below, section C) will be applied immediately to halt the axis.
Target Speed: This is the speed at which the axis will move. The Control Output will be
ramped to the specified Output Voltage and remain there until the Actual Velocity reaches
this value (see profile below, section A).
Move Direction: Specify which direction move. If you are doing two moves, this specifies
the direction of the first move.
Output Voltage: Specifies the amount of Control Output voltage that will be applied
during autotuning. This value should be large enough for the Actual Velocity to reach the
Target Speed.
Ramp Rate: Specifies how fast the Control Output should ramp up to the specified
Output Voltage. This needs to be fairly high to provide enough information about the
system. For systems with fast response, you may wish to increase this value.
Plot Duration: This must be long enough to capture the entire move. Torque mode
systems with low damping may require a very long plot duration. If the entire move is not
captured, click back to this page and increase the plot duration. The plot duration should
be less than twice as long as the move time.
The Profile
For torque mode autotuning, when you instruct the wizard to move the axis, it will
generate an open loop voltage profile similar to that shown below. Notice that this move
deltamotion.com
269