Acceleration control, R acceleration control, Acceleration – Delta RMC151 User Manual
Page 116: S acceleration control
RMC70/150 and RMCTools User Manual
Position-based
a. Set the High-Order Control parameter to Active Damping. This is only valid if the
axis is position only. If the axis has a secondary feedback, the active damping will use
the secondary feedback.
b. Set the Acceleration Filter Type parameter to Model or Low Pass. This is necessary
to obtain usable acceleration readings. See the modeling and filtering topics for
details.
Velocity-based
a. Set the High-Order Control parameter to Active Damping. This is only valid if the
axis is position only. If the axis has a secondary feedback, the active damping will use
the secondary feedback.
b. Set the Acceleration Filter Type parameter to Model or Low Pass. This is necessary
to obtain usable acceleration readings. See the modeling and filtering topics for
details.
Tuning Active Damping
Active Damping adds the Active Damping Proportional Gain and Active Damping
Differential Gain to the PID or I-PD control algorithm. See the Tuning Active Damping and
Acceleration Control topic for details on tuning these gains.
3.5.12.4. Acceleration Control
Acceleration Control is a High-Order Control option that adds high-order gains to the
position control algorithm. These high-order gains operate on the higher-order derivatives of
the controlled value. For example, on a position control axis, the Double Differential Gain
operates on the second derivative of position.
Using acceleration control improves motion control in certain cases, such as for pneumatic
systems.
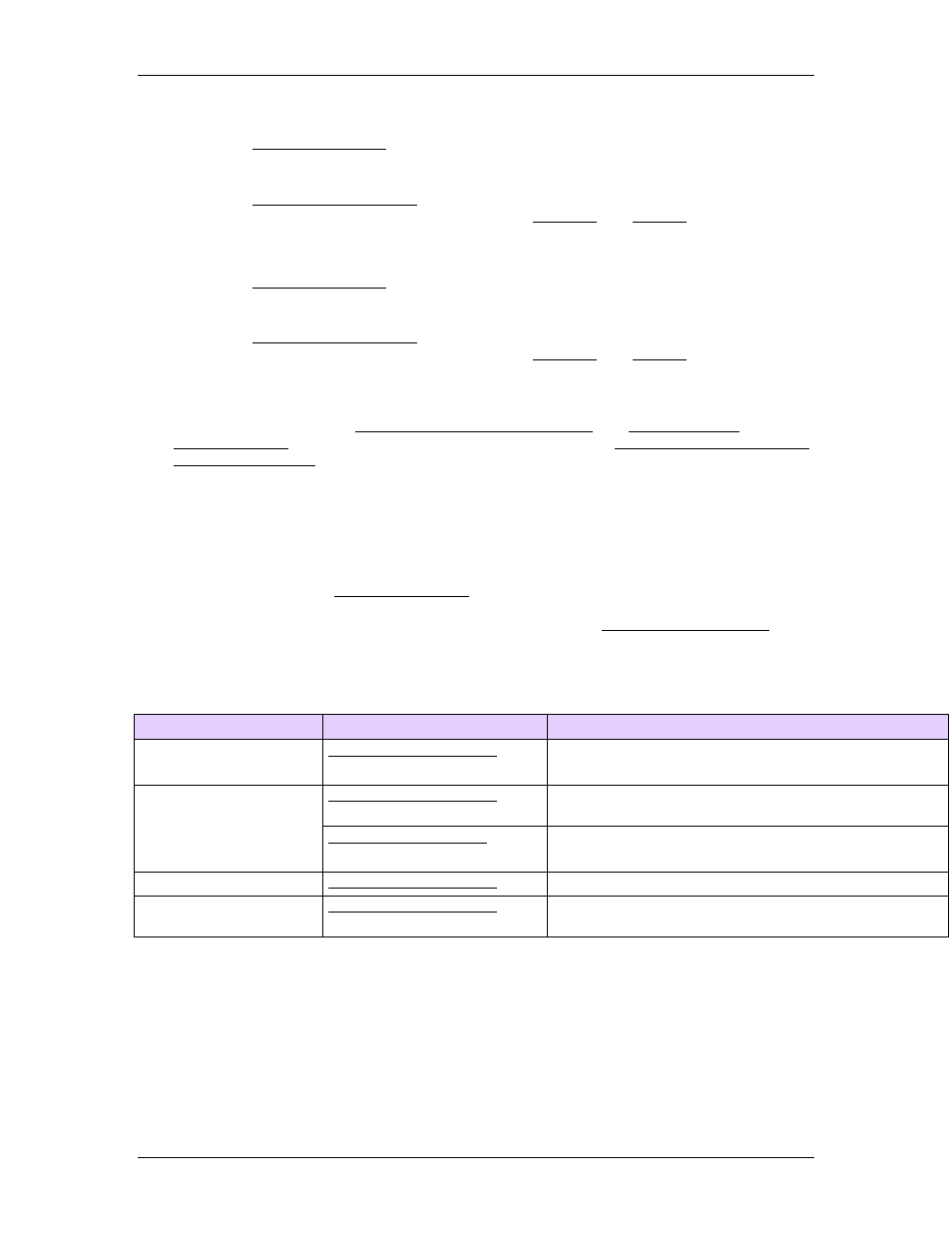
The higher-order gains made available by Acceleration Control depends on the axis type:
Axis Type
Available High-Order Gains Operates on:
Position Control
Actual Acceleration based on the position input
(2nd derivative of Actual Position)
Position-Acceleration
Control
Actual Acceleration from the secondary acceleration
input
Actual Jerk based on the secondary acceleration input
(1st derivative of Actual Acceleration)
Velocity Control
1st derivative of Actual Velocity
Velocity-Acceleration
Control
1st derivative of Actual Velocity
Effect on Control
Acceleration control can improve the motion control in certain cases because of the added
terms.
For position only or velocity only control axes, the noise in the position or velocity
measurement (mostly due to the conversion to digital values) requires the derived
acceleration measurement to be filtered or smoothed quite a bit before it can be used.
This introduces delays or other errors which diminish its effectiveness.
96
Delta Computer Systems, Inc.