Delta RMC151 User Manual
Page 758
RMC70/150 and RMCTools User Manual
the slave will remain stopped or geared at 0:1 until the master reaches the modified
Master Start Position.
Example
Consider a Gear Pos (Clutch by Distance) command issued with the parameters listed
below. The command is issued when the slave axis is stopped at 0. Therefore, the Slave
Start Position is 0.
Ratio = 1
Master Sync Pos = 5
Slave Sync Pos = 1
Master Start Distance = 4
The Slave Distance = Slave Sync Position - Slave Start Position = 1 - 0 = 1.
Also, (2.5 x Slave Distance / Final Gear Ratio) = (2.5 x 1 / 1 ) = 2.5.
Therefore, the specified Master Start Distance of 4 is greater than 2.5 as calculated
above and will be limited to 2.5.
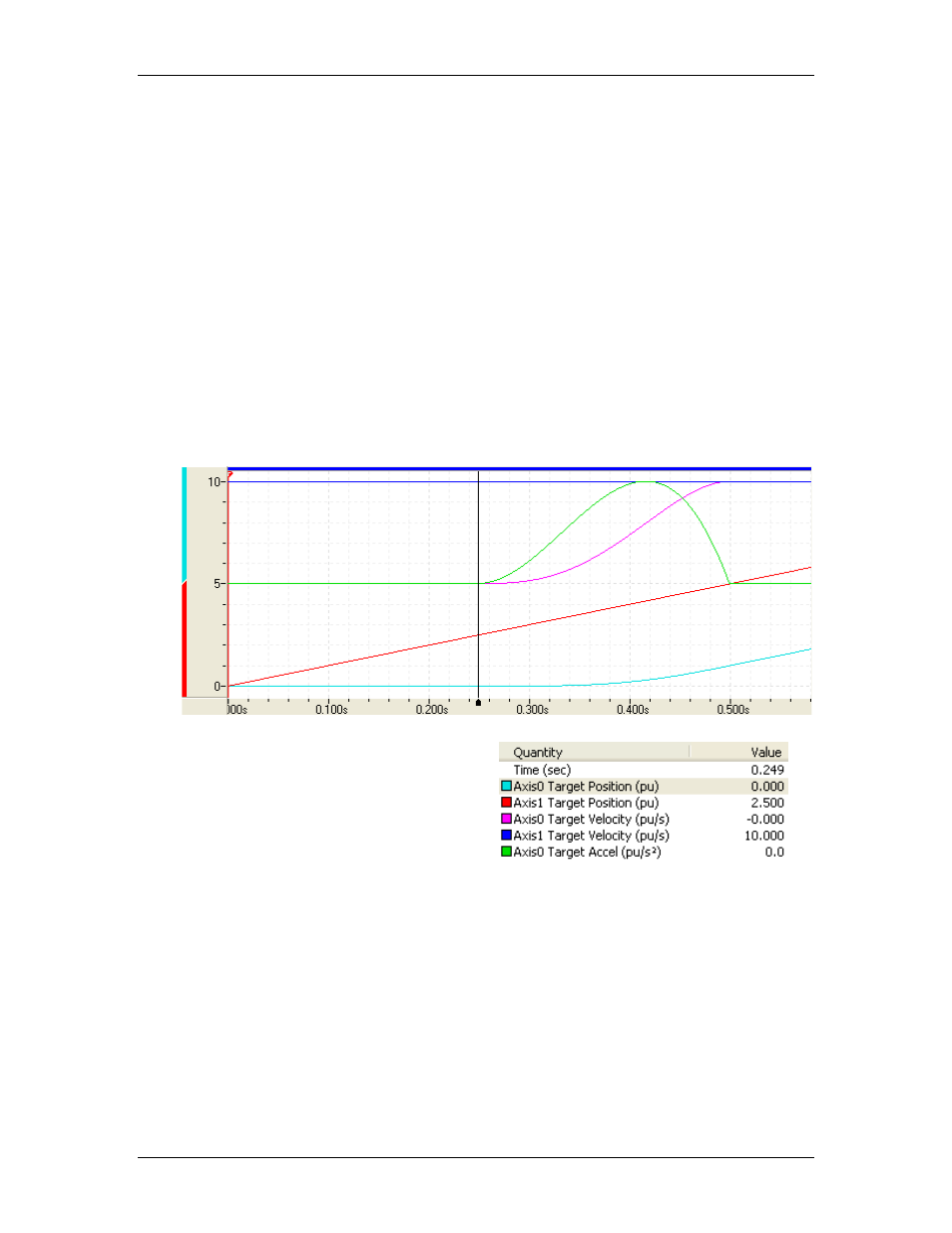
The plot of the motion looks like this:
The legend to the right indicates the
values at the cursor in the plot. The
Gear Pos (Clutch by Distance)
command was issued at the
beginning of the plot. Notice that
the slave begins moving when the
master is at 2.5 (the Master Sync
Pos - Master Start Distance = 5 -
2.5 = 2.5). Before that point, the
slave continues at the initial ratio,
which was 0:1.
Plot Legend
Important Master Start Distance Values
As discussed above, if the slave is initially stopped or geared at a ratio of zero, the
Master Start Distance will be limited to (2.5 x Slave Distance / Final Gear Ratio).
However, other values are also important. The ratio between the master and slave
distances divides the behavior into four classes:
•
≥ 2.5 x Slave Distance / Final Gear Ratio
•
= 2.0 x Slave Distance / Final Gear Ratio
•
= 1.6666 x Slave Distance / Final Gear Ratio
•
< 1.6666 x Slave Distance / Final Gear Ratio
738
Delta Computer Systems, Inc.