Delta RMC151 User Manual
Page 207
3 Controller Features
Magnetostrictive Displacement Transducers (MDT) are absolute position transducers designed
for use in rugged industrial environments. They are non-contact, wear-free, highly reliable,
and offer accurate and repeatable linear position measurement. In the motion control
industry, magnetostrictive displacement transducers are typically inserted into hydraulic
cylinders for measurement of the cylinders position.
For MDT Start/Stop or PWM feedback with a typical calibration value of 9 µs/in, the maximum
resolution supported by the RMC70 is 0.0005 in with 1 recirculation. The maximum resolution
supported by the RMC150 is 0.001 in with 1 recirculation.
MDT feedback is supported by the following modules:
RMC70: MA axis module
Each axis on the RMC70 MA axis module can be individually configured for MDT or SSI
inputs.
RMC150: MDT module
Each RMC70 or RMC150 MDT axis can be configured for a Start/Stop transducer or a Pulse
Width Modulated transducer.
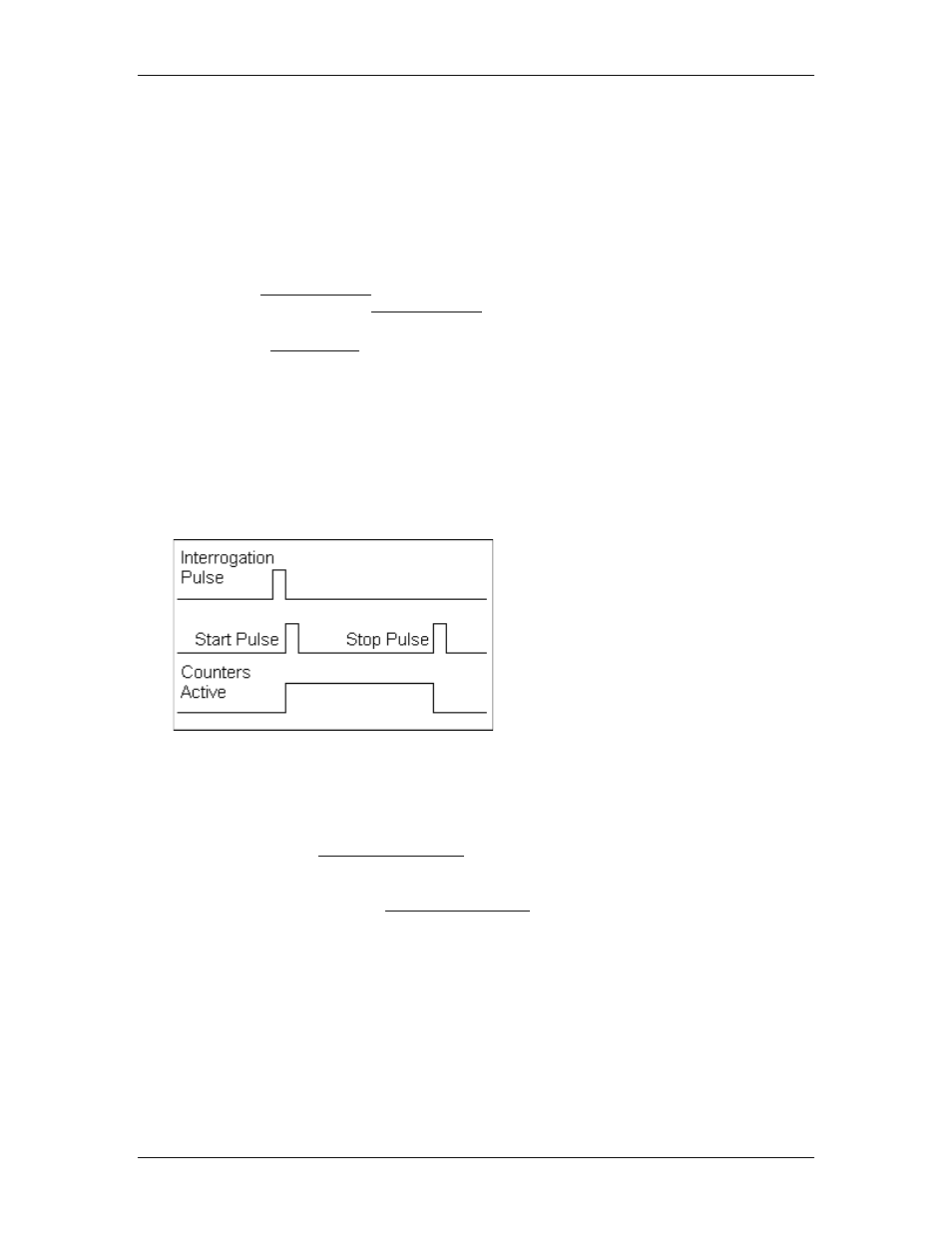
Start/Stop
To make a measurement with a Start/Stop transducer, the RMC sends an interrogation
pulse to the transducer. The transducer responds by returning 2 pulses—a Start pulse
and a Stop pulse. The RMCs internal counters begin to count when the first pulse, Start,
is received and stop counting when the second pulse, Stop, is received. The time between
the start pulse and the stop pulse is proportional to the transducer position.
Start/Stop Pulse Transducer
Blanking Period (For Neuter Outputs)
After the RMC receives the start pulse, it waits a brief amount of time before looking for
the stop pulse. This time, called the MDT blanking period, gives time for noise to settle
out.
The RMC150 has an MDT Blanking Period parameter, with options of 5µsec or 21µsec.
The default value is 5µsec. Some older transducers, such as Temposonics I and II with
neuter outputs, require the longer blanking period of 21µsec, due to noisy signals.
The RMC70 does not have an MDT Blanking Period parameter and always uses a 5µsec
blanking period. Therefore, Temposonics I and II transducers with neuter outputs should
not be used with the RMC70, but can be used with the RMC150.
PWM
To make a measurement with a Pulse Width Modulated transducer, the RMC sends an
interrogation pulse to the transducer. The transducer responds with a return signal. The
return signal is high while the transducer is determining its position. The RMC counts
during the time that the return signal is high. The time that the return signal is high is
proportional to the transducer position.
deltamotion.com
187