Delta RMC151 User Manual
Page 741
8 Command Reference
Command Parameters
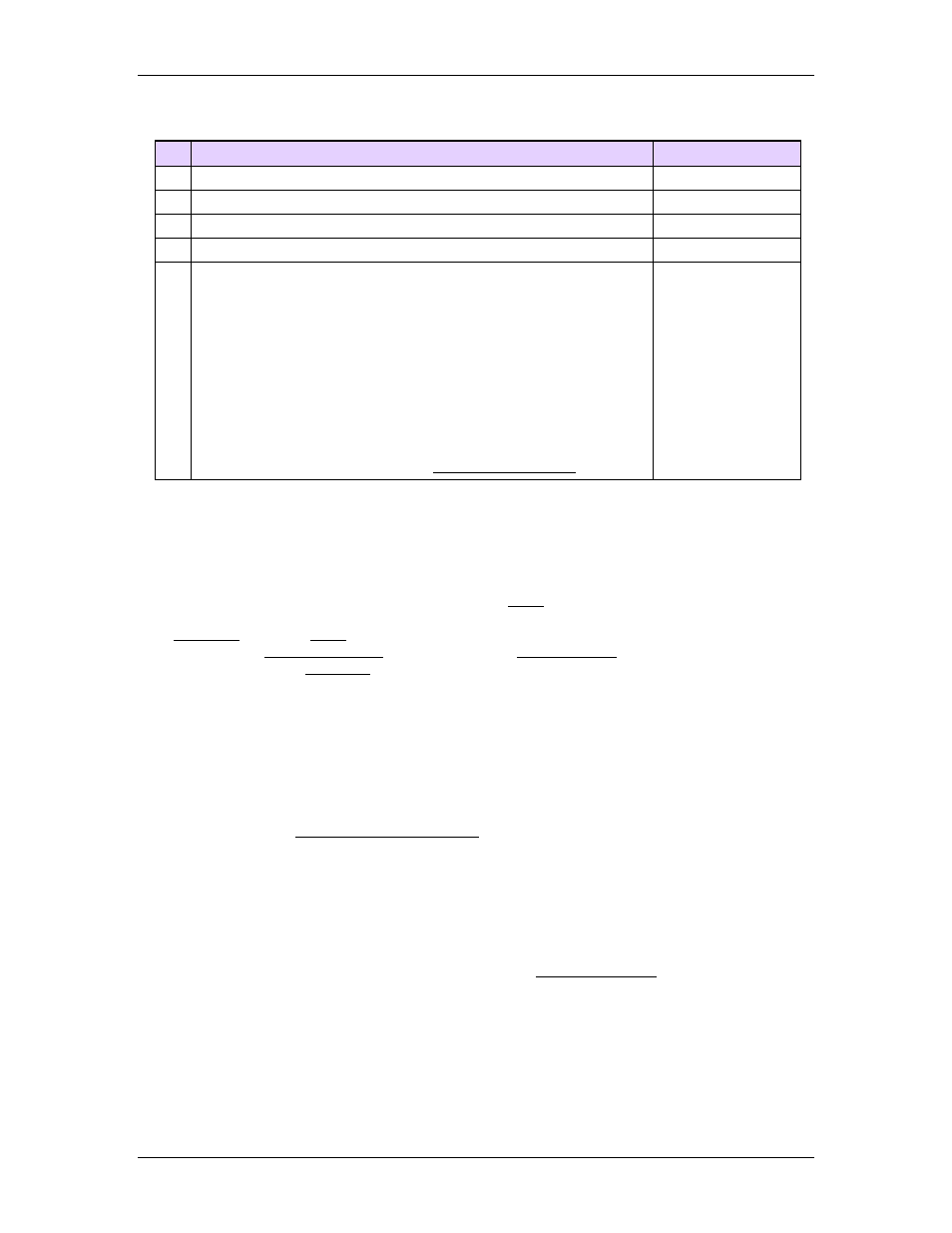
# Parameter Description
Range
1 Requested Position (position-units)
any
2 Final Velocity (position-units/s)
any
3 Final Acceleration (position-units/s
2
)
any
4 Time for Move (sec)
>0
5 Direction
•
Negative* (-1)
•
Nearest (0)
•
Positive* (1)
•
Current* (2)
•
Absolute* (3)
* These options are intended for use with rotary axes.
However, all options are available on linear axes, but have no
effect. For more details, see the Using Rotary Motion topic.
a valid integer as
described
Description
This command calculates a target using a 5th-order polynomial. The closed-loop move
will end with the requested conditions: position, velocity, and acceleration. The
Requested Position is reached in the Time for Move. If the final velocity or
acceleration is non-zero, this command should be followed by another motion command.
Once the Requested Position is reached, the Done status bit will be set. If either the
Final Velocity or Final Acceleration are non-zero, the polynomial will continue for one
loop time after the Done Status bit is set, and if a new command is not issued during this
time, then a Closed Loop Halt will occur and the Runtime Error will be set (notice that if
the Runtime Error AutoStop is set to a different type of halt, that halt will also occur). If
the Final Velocity and the Final Acceleration are both zero, then the axis will hold
position and no errors will be set.
This command is intended to be followed by another command, especially if either the
Final Velocity or Final Acceleration are non-zero. Typically, this command is used only
in a user program, where it is very easy to issue another command immediately when the
Done bit is set. Use the Wait For or Conditional Jump Link Types to check for the Done
bit.
This command creates a profile based on time. To make a profile based on a master
position, see the Advanced Gear Move (33).
Why Bother?
This command is useful if you want to specify what the velocity and acceleration at a
position and time should be. This command is typically used for only a segment of a
move, and you should always issue another command after this one when the Done
Status bit is set. This can easily de done in the User Programs. You can issue several of
these moves in a row to get the motion profile you want, especially if you need to specify
the velocity and acceleration at certain points. The Expression (113) command can be
used to calculate the position, velocity, and position should be based on the type of
profile desired. Complex profiles may require many individual segments using the
Advanced Time Move commands.
Using the Advanced Time Moves in User Programs
Indexing Arrays
deltamotion.com
721