Delta RMC151 User Manual
Page 823
8 Command Reference
This command sets up an absolute linear gearing relationship between the master
register and the pressure/force target for the axis this command was issued to (the slave
axis) and will make the slave axis follow that relationship. Typically, the master register is
the Actual Pressure/Force of a reference axis. This command is very useful for making an
axis follow a reference input (half-axis).
When this command is issued, the Target Pressure/Force for the slave axis must either
already be at the correct point specified by the relationship based on the current value of
the master, or a Transition command must previously have been issued to specify how
the axis should move to get to the line.
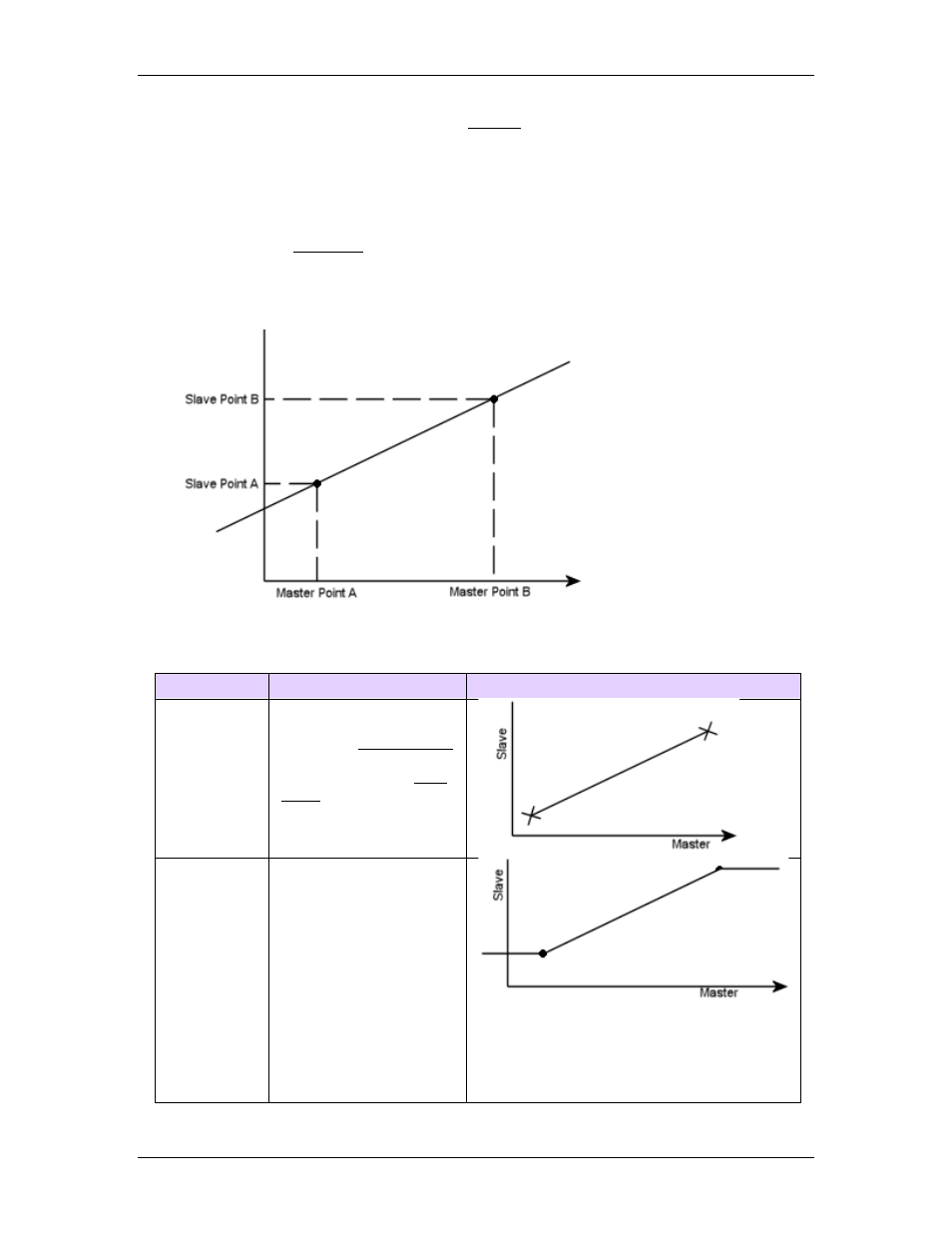
Master Point A, Master Point B, Slave Point A, and Slave Point B specify the linear
relationship. The behavior beyond these points depends on the Endpoint Behavior
parameter.
EndPoint Behavior
The Endpoint Behavior specifies what happens to the slave axis if the master moves
outside of the range specified by Master Point A and Master Point B:
Option
Description
Image
Fault
If the master exceeds
either endpoint, the
slave axis' runtime error
bit will be set which will
halt the axis if the Auto
Stops are configured to
do so.
Truncate
If the master moves
past an endpoint, the
slave axis' Target
Pressure/Force will stop
at the endpoint. When
the master moves back
into the range, the
gearing will resume.
Notice that if the master
is moving quickly when
it exceeds the endpoint,
it may cause the slave's
Target Pressure/Force
to stop abruptly.
deltamotion.com
803