Command: time move absolute (23), Time move absolute (23), Time move absolute – Delta RMC151 User Manual
Page 738
RMC70/150 and RMCTools User Manual
Target Generator State A and B bits
B
A Description
0
0
The target generator is complete
0
1
Ramping Control Output in Open Loop
1
0
Constant Control Output at Requested Output
1
1
Decelerating in Closed Loop
8.4.5.5. Command: Time Move Absolute (23)
Supported Axes: Position Control Axes
Supported Control Modes: Position PID, Position I-PD
Firmware Requirement: 1.00 or newer
See the Commands Overview topic for basic command information and how to issue
commands from PLCs, HMIs, etc.
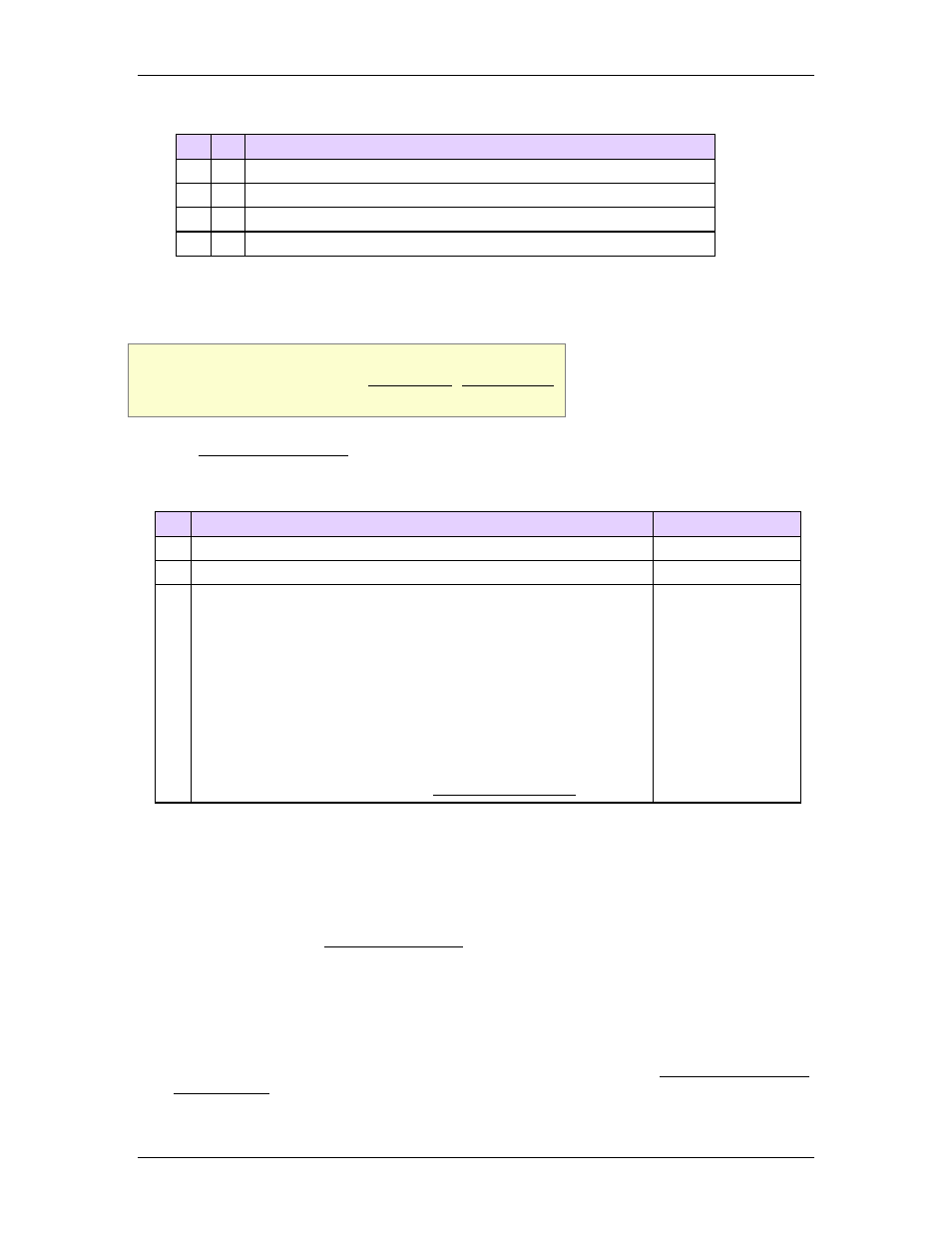
Command Parameters
# Parameter Description
Range
1 Requested Position (position-units)
any
2 Time for Move (sec)
≥0
3 Direction
•
Negative* (-1)
•
Nearest (0)
•
Positive* (1)
•
Current* (2)
•
Absolute* (3)
* These options are intended for use with rotary axes.
However, all options are available on linear axes, but have no
effect. For more details, see the Using Rotary Motion topic.
a valid integer as
described
Description
This commands moves the axis in closed loop control from the current position to the
Requested Position in the Time for Move specified using a single fifth-order function.
Acceleration and velocity are not limited. The axis will hold the final position in closed loop
control.
If you need to complete a move in a given time, but need to limit the velocity and/or
acceleration, see the Move Absolute (20) command topic.
Steps Jumps
If the Time for Move parameter is set to zero, the Target Position will immediately to
jump to the requested position.
Re-sending While Moving
Re-sending this command while moving will cause the Target Acceleration to be set to
zero, which will cause a velocity bobble. If this is undesired, use the Advanced Time Move
Absolute (26) command, which will use the current Target Acceleration. Notice that the
718
Delta Computer Systems, Inc.