Delta RMC151 User Manual
Page 691
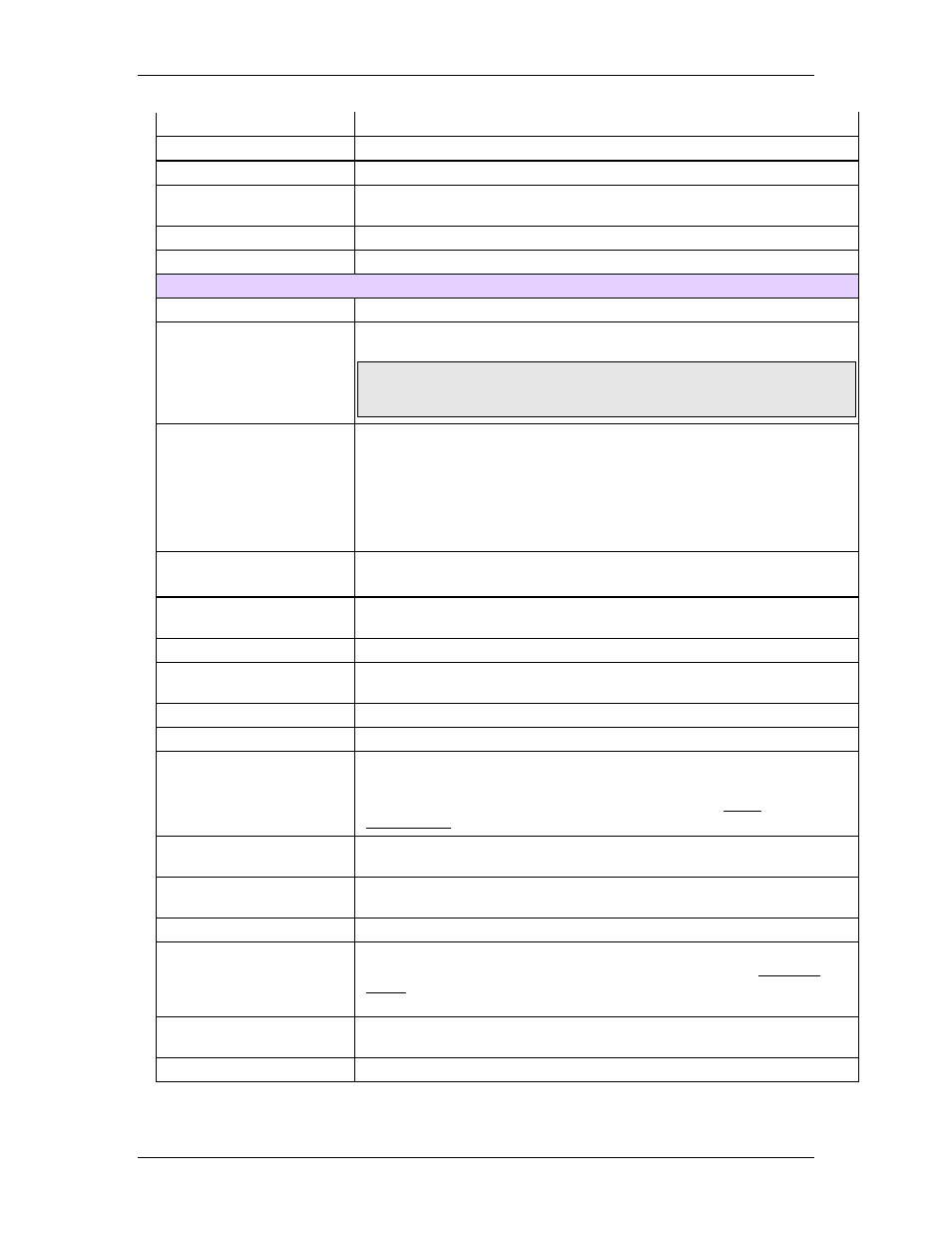
7 Hardware
Logic Polarity True On
Maximum Voltage ± 30 V (DC or peak AC voltage rating of SSR)
Maximum Current ±75 mA
Maximum Propagation
Delay
1.5 ms
Logic 1 (True, On) Low impedance (50 Ω maximum, 25 Ω typical)
Logic 0 (False, Off) High impedance (<1 µA leakage current at 250 V)
High-Speed Channels
Channels 2, independently configurable
Transducer types Magnetostrictive (with SSI output), single- or multi-turn absolute
encoders, quadrature encoders.
Note: Linear magnetostrictive transducers with SSI output should
be of the synchronized type. Non-synchronized is not well-suited
for motion control.
Modes Quadrature input
SSI Standard input – for interfacing to transducers and encoders
SSI Monitor input – for monitoring SSI communication on another
device
SSI Slave output – emulates a transducer
SSI Master output – for sending data to another controller
Input Type
(Data/Clock/Quad)
RS-422 (5 V differential)
(Single-ended encoders not supported due to low noise immunity)
Output Type
(Clock/Data)
RS-422 (5 V differential)
Clock frequency 250 kHz, 500 kHz, or 971 kHz, user-selectable
Resolution Transducer dependent (typically down to 2 μm or approximately
0.00008” for MDTs)
SSI Count encoding Binary or Gray Code
SSI Count data length 8 to 32 bits
Input Impedance 16 kΩ unterminated
120 Ω terminated
A and B termination is software-selectable via the Input
Termination parameter.
Registration Discrete inputs 0 and 1 can be used as high-speed registration for
channels 0 and 1 respectively.
Registration Response
Time
160 μs
Max Encoder Frequency 8,000,000 quadrature counts per second
Maximum Cable Length Dependent on transducer and cable quality (Low capacitance,
shielded, twisted pair computer communication cable). SSI Wire
Delay compensation can allow wire lengths that exceed the
transducer manufacturer's specifications.
Electrostatic Discharge
(ESD)protection
15 kV (human body model)
Isolation 500 VAC
deltamotion.com
671