Delta RMC151 User Manual
Page 367
5 Programming
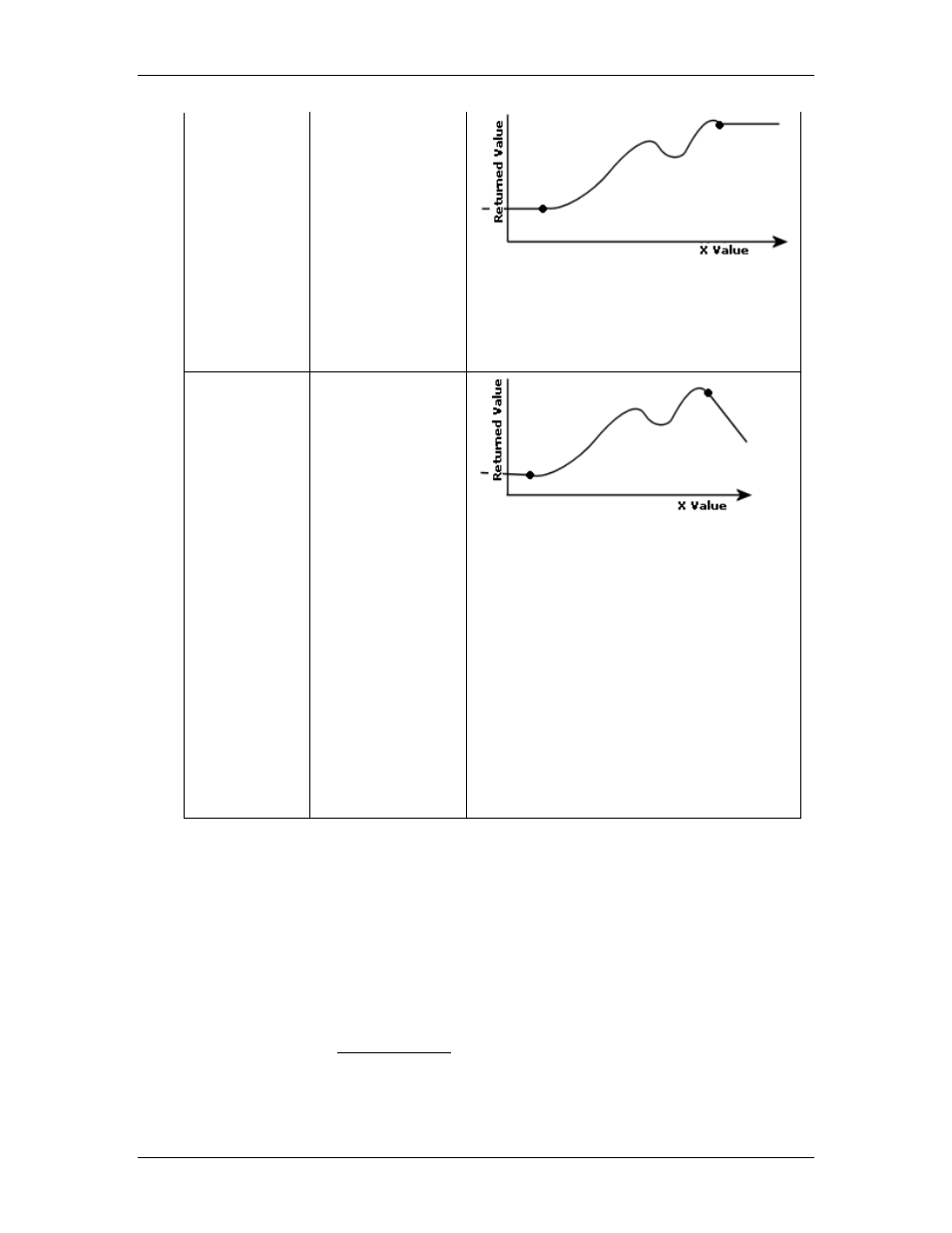
4: Truncated
If x is beyond the
endpoints of the
curve, the curve
holds it position at
each endpoint:
CRV_INTERP_Y
will return the Y
value of the
closest endpoint
of the curve.
CRV_INTERP_V
will return zero.
CRV_INTERP_A
will return zero.
8:
Extrapolated
If x is beyond the
endpoints of the
curve, the curve
will be
extrapolated
linearly, and that
value returned:
CRV_INTERP_Y
will return the
extrapolated Y
value. The curve
will be
extrapolated
linearly, using
the velocity of
the curve at the
closest endpoint
of the curve.
CRV_INTERP_V
will return the
velocity of the
closest endpoint
of the curve.
CRV_INTERP_A
will return zero.
Returns
The interpolated Y, velocity, or acceleration value of the specified curve at the given value
of x. The returned data type is REAL.
Remarks
These functions can be used for purposes such as:
•
Gain Scheduling
If the application requires different tuning gains based on some value, such as
position, a curve can be created that defines the gain based on that value. A simple
user program can then use the CRV_INTERP_Y interpolation function to continuously
apply the gain. See Gain Scheduling for details.
•
Run a curve on a velocity axis
Velocity axes do not currently support curves directly. To run a curve on a velocity
axis, first create a curve where the y values represent velocity. Make a simple user
deltamotion.com
347