Filtering/modeling, Actual position filter – Delta RMC151 User Manual
Page 924
RMC70/150 and RMCTools User Manual
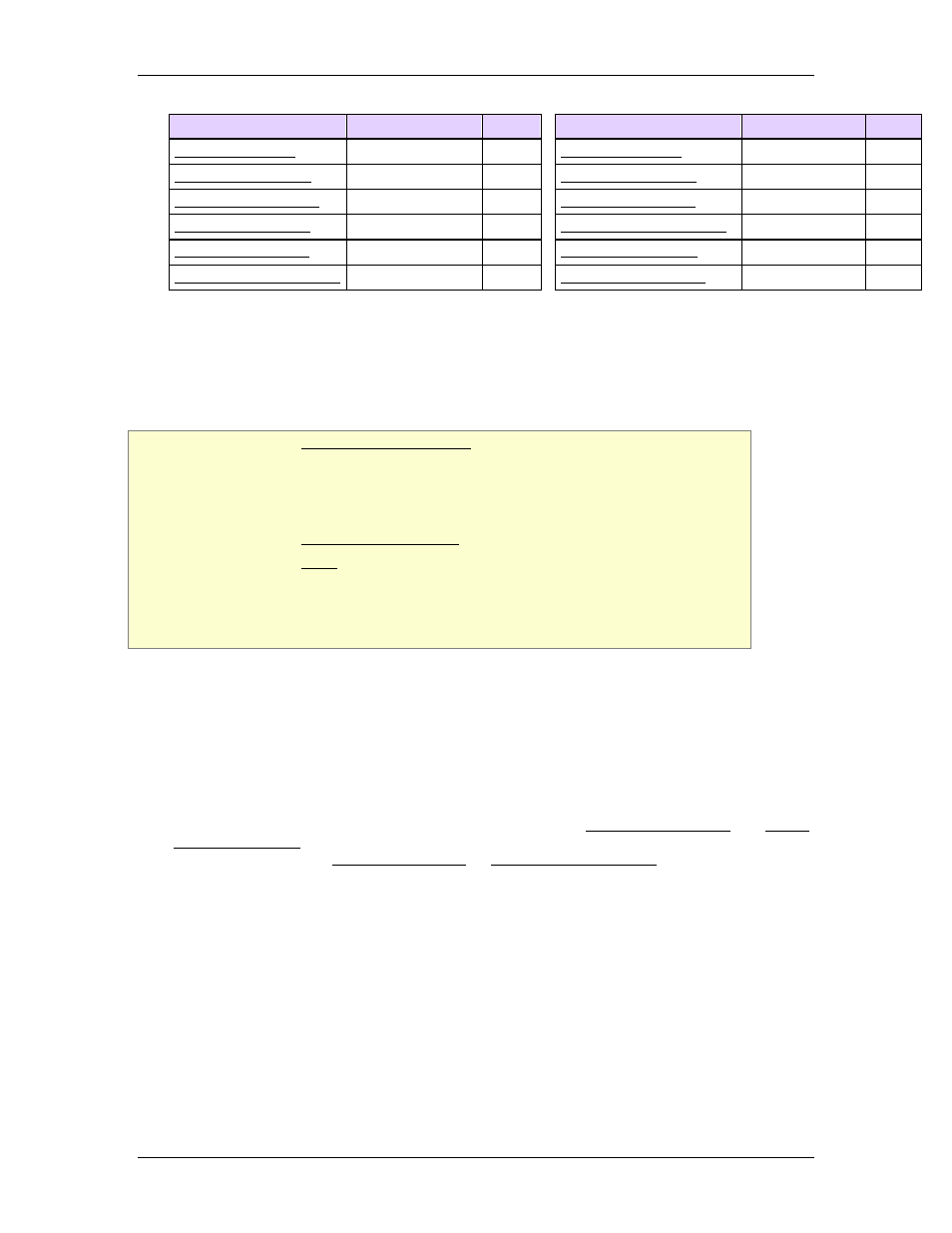
Parameter
Tag
Bit(s)
Rotary
0
PosLimitIn
4-7
NegLimitIn
8-11
LimitInPol
12
VelFilterType
13-14
AccelFilterType
15-16
Parameter
Tag
Bit(s)
Rotary
0
LimitInPol
1
VelFilterType
4-5
AccelFilterType 6-7
PosLimitIn
8-15
NegLimitIn
16-23
For details on the values that each bit represents, see the respective parameter topic.
9.2.2.2.20. Filtering/Modeling
9.2.2.2.20.1. Actual Position Filter
Type: Axis Parameter Register
RMC70 Address: %MDn.2, where n = 12 + the axis number
RMC150 Address: %MDn.2, where n = 24 + the axis number
System Tag: _Axis[n].ActPosFilter, where n is the axis number
How to Find: Axes Parameters Pane, All tab: Feedback → Filtering/Modeling
Data Type: REAL
Units: Hz
Range: 0 (Off) or greater than 0.01
Default Value: 0
Description
This parameter specifies the cut-off frequency of the Actual Position input filter in hertz.
The filter is applied to the Actual Position before it is used in the control algorithm. The
filter is a low-pass fourth order Butterworth filter. Setting this value to zero (0) disables
the Actual Position filter.
Filtering of the Actual Position is not recommended on position control axes. The control
algorithms use the filtered Actual Position. If filtering is enabled, it will slow the response
of the system. The lower the cut-off frequency, the slower the system will respond.
Notice that this Actual Position filter is independent of the Actual Velocity Filter and Actual
Acceleration Filter. If the Actual Velocity and Actual Acceleration filters are being used on
the controlled values (Velocity Filter Type or Acceleration Filter Type are set to Low-Pass
or Model), then you should make sure to always set the Actual Position filter, Actual
Velocity Filter, and Actual Acceleration filter to the same values.
Limits
The filter is limited to greater than 0.01 due to inaccuracies in the calculations for lower
values. The filter is disabled (without notice to the user) when the frequency is set above
1/4 the sample frequency (500Hz for 500us loop, 250Hz for 1ms loop, 125Hz for 2ms
loop, 62.5Hz for 4ms loop).
Why Bother?
Filtering the input can reduce noise in the feedback. It also makes the plots look cleaner.
Filtering of the position should not be done on control axes.
904
Delta Computer Systems, Inc.