Velocity, Command: move velocity (37), Move velocity (37) – Delta RMC151 User Manual
Page 800
RMC70/150 and RMCTools User Manual
This bit will be set during the transition. The transition begins when the motion
command is issued, not necessarily when the Transition command is issued. When the
transition completes, this bit will clear.
8.4.8. Velocity
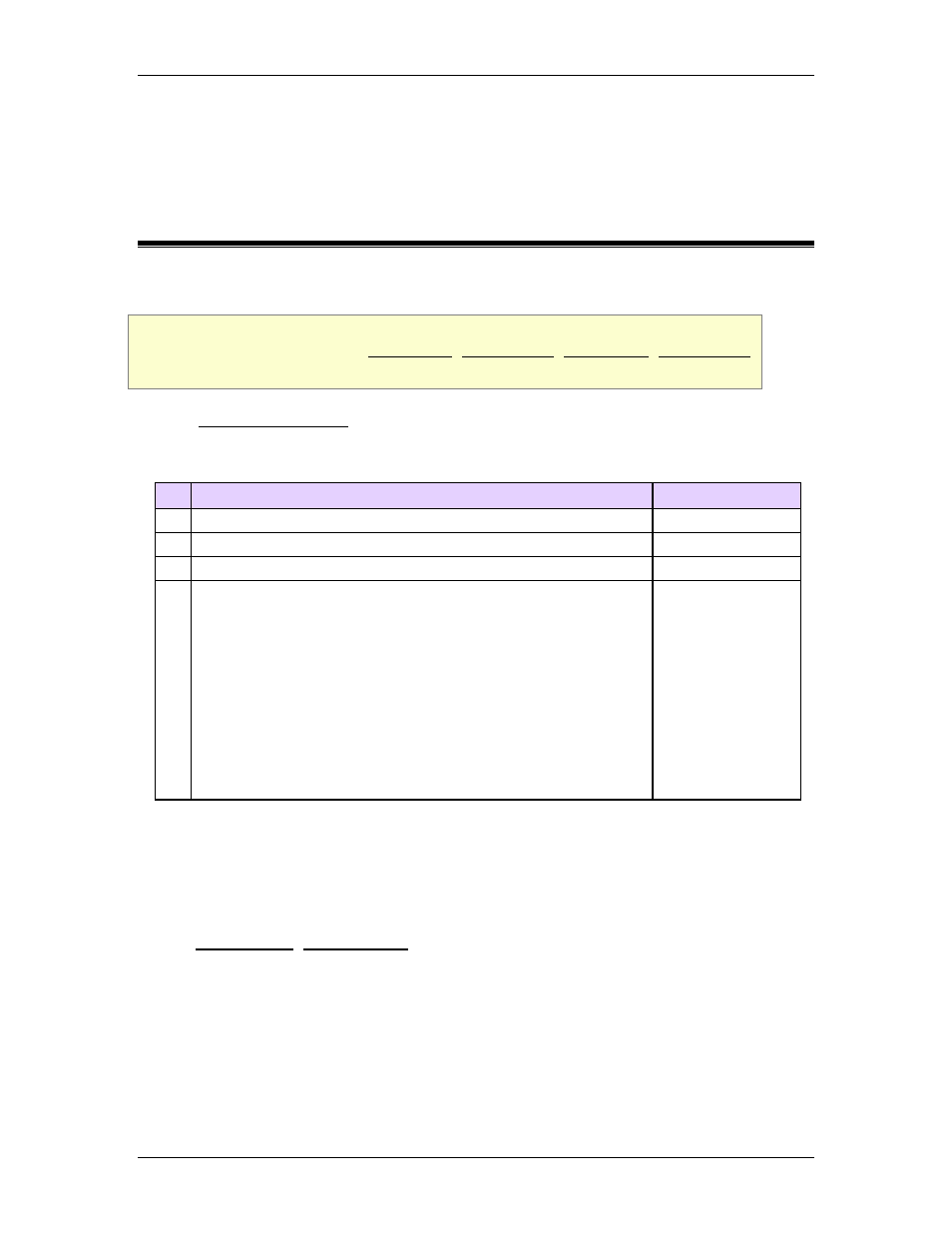
8.4.8.1. Command: Move Velocity (37)
Supported Axes: Position or Velocity Control Axes
Supported Control Modes: Position PID, Position I-PD, Velocity PID, Velocity I-PD
Firmware Requirement: 1.32 or newer
See the Commands Overview topic for basic command information and how to issue
commands from PLCs, HMIs, etc.
Command Parameters
# Parameter Description
Range
1 Requested Speed (position-units/s)
any
2 Acceleration Rate (position-units/s
2
)
>0
3 Deceleration Rate (position-units/s
2
)
>0
4 Direction
•
Positive (1): Moves at a positive velocity. Speed
must be positive.
•
Negative (-1): Moves at a negative velocity. Speed
must be positive.
•
Current (2): Moves at the current Target velocity. If
the Target Velocity is zero when the command is
issued, it will move with a positive velocity. Speed
must be positive.
•
Signed (4): The direction of the move is determined
by the sign of the Speed command parameter.
a valid integer as
described
Description
This command ramps the axis velocity to the Requested Speed. The velocity is ramped
at the rates specified by the Acceleration Rate and Deceleration Rate. The
Acceleration Rate is used when ramping the speed away from zero and Deceleration
Rate is used when ramping the speed toward zero.
The behavior of the motion depends on the control mode:
•
In these modes, the Move Velocity performs Continuous Position Control. The
Move Velocity command does not actually generate a Target Velocity. Instead, it
generates a moving Target Position. The Target Position will move at the specified
rate until commanded otherwise. Therefore, if the axis falls behind, it will not try to
catch up to the Target Velocity; it will actually attempt to catch up to the Target
Position. This may cause the axis to move considerably faster than the Target
Velocity while it catches up.
In these control modes, the Move Velocity command works well for applications
where it is important that the Target Position is always moving at a certain rate. If it
780
Delta Computer Systems, Inc.