Delta RMC151 User Manual
Page 23
1 Introducing the RMC Family
Target Profile
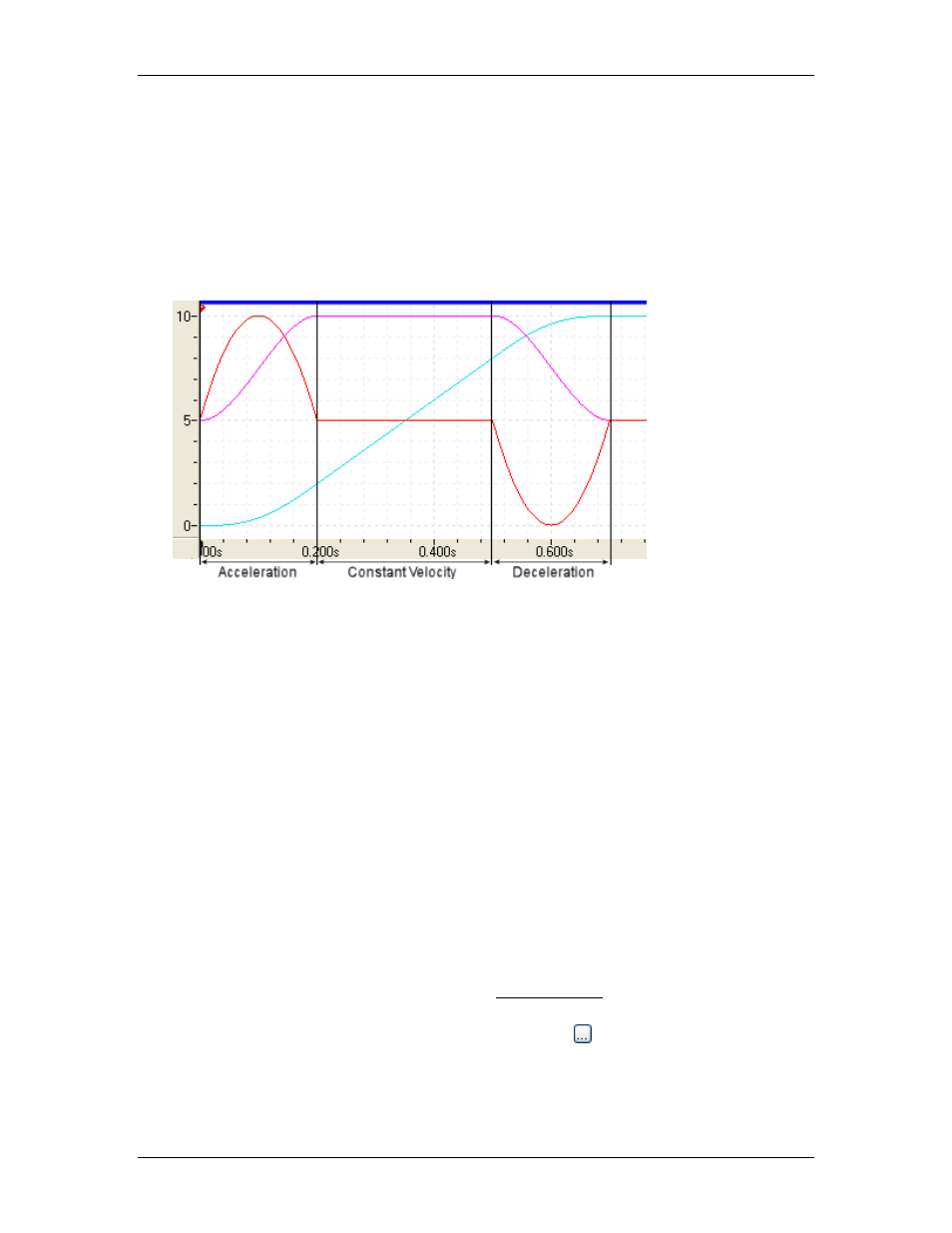
When the RMC is commanded to make a move in closed loop control, it generates a
target profile, which specifies where the position (or velocity, pressure, or force) should
be at any given point in time. This profile includes the Target Position, Target Velocity,
and Target Acceleration.
For example, if a Move Absolute command is issued to the RMC, it will generate a profile
according to the parameters of the command. The plot below shows a typical Move
Absolute target profile. The position is moving from zero to ten. The RMC uses rounded
accelerations to provide smooth motion.
Legend:
— Target Position
— Target Velocity
—
Target Acceleration
PID Algorithm
Generating a target profile determines where the axis should be, but does not make the
axis move. In order to move the axis, the RMC uses a PID algorithm that calculates how
much Control Output is required to make the Actual Position follow the Target Position.
The RMC obtains the Actual Position from the transducer.
The PID algorithm uses several values, called gains, that specify how the PID calculates
the Control Output. For each axis, in every motion application, these gains must be
adjusted to obtain optimal control of the system. This process is called "tuning".
RMCTools offers a Tuning Wizard that significantly speeds up the process of tuning.
Tuning can also be done manually.
An axis must be tuned before the RMC can be controlled in closed loop control.
Making Moves
To make an axis move, issue a motion command. The Issuing Commands section below
describes how to issue commands. The RMC has many motion commands for various
types of motion. See the Motion Commands section of the Command Reference chapter
for a complete description of the motion commands in the RMC.
Issuing Commands
To make the RMC do something, such as move, turn on a discrete output, or run a user
program, you must issue a command. For example, to move the axis to a position, you
would issue a Move Absolute command.
To issue a command from RMCTools, use the Command Tool:
1. On the View menu, choose Command Tool.
2. In the Cmd box of the desired axis, click the ellipsis ( ) button.
3. Browse to the command you need and click OK.
4. If the command has parameters, fill them out.
5. Click Send to issue the command to the RMC.
deltamotion.com
3