Homing – Delta RMC151 User Manual
Page 75
3 Controller Features
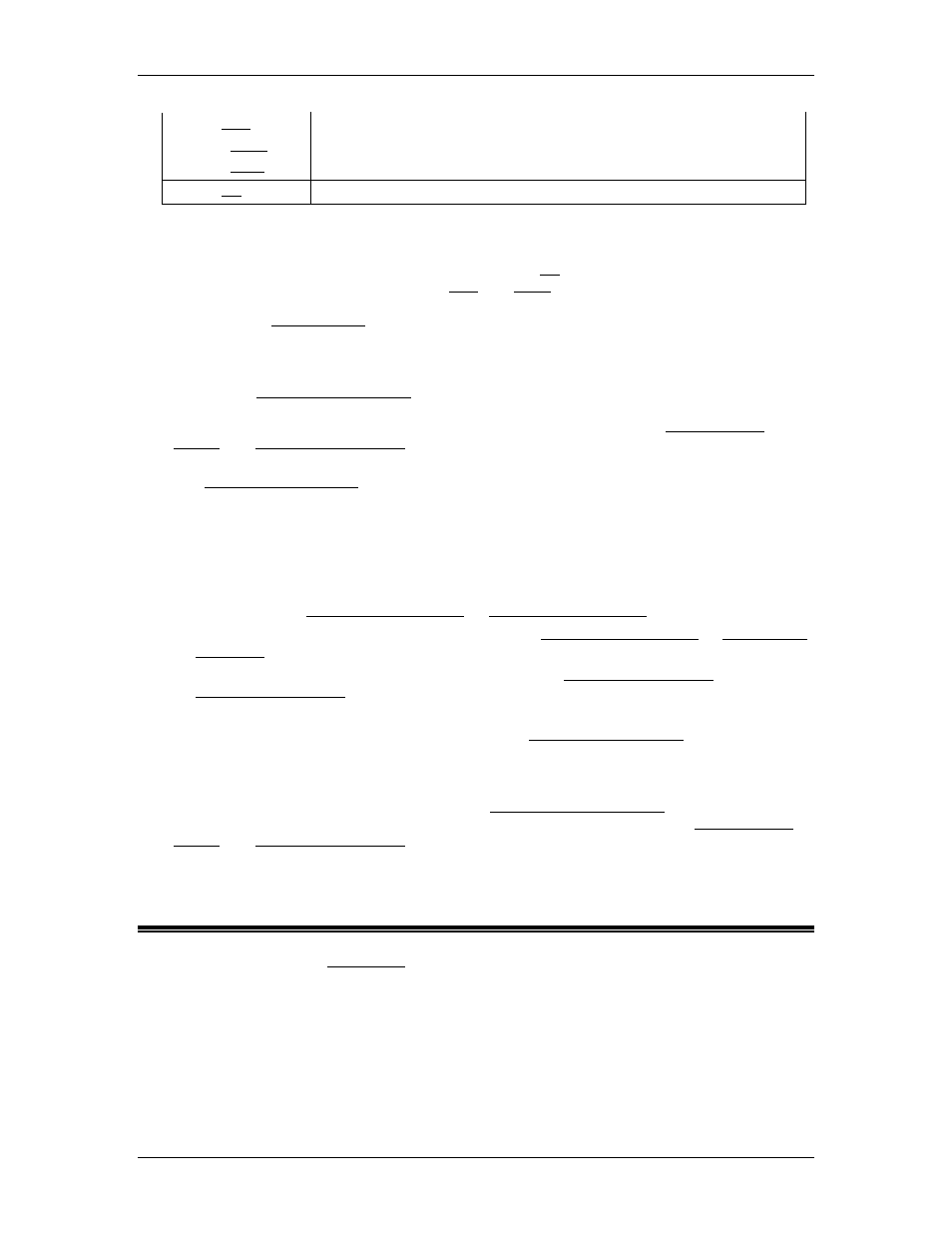
RMC70 QAx or
RMC150 Quad
RMC150 UI/O
RegX/PosLim input
RegY/NegLim input
DI/O inputs R0and R1
RMC70 Q1
Reg input
Registration Positions
Each quadrature feedback axis can keep track of two independent registration events,
called Registration 0 and Registration 1. On the Q1 module, both registrations can
only come from the Reg input. On the QAx and Quad modules, either registration can
come from either the RegX or RegY input, or both registrations can come from one
input. On the Universal I/O module, the channel 0 registration can come from R0 and the
channel 1 registration can come from the R1 input.
Arming the Registration
Issuing the Arm Registration (52) command tells the axis to wait for a registration event.
Once this command is issued, the registration is said to be armed. When the registration
is armed, the corresponding registration armed status bit will be set (Registration 0
Armed and Registration 1 Armed). Unless the registration is armed, the registration
trigger is ignored.
The Arm Registration (52) command also tells the axis which Registration Number (0 or
1) to apply the registration event to, which input the registration will be triggered from,
and which edge of the input (rising or falling) will trigger the registration.
Registration Event
If the registration is armed and a registration trigger occurs, the following is done:
•
The precise position at the time of the registration is latched. The position will be
reported in the Registration 0 Position or Registration 1 Position status register.
•
The corresponding latched status bit will be set (Registration 0 Latched or Registration
•
The corresponding armed status bit will be cleared (Registration 0 Armed or
Once a registration is latched, you must issue the Arm Registration (52) command again
to rearm it.
Disarm Registration
To manually disarm a registration, issue the Disarm Registration (53) command. Issuing
this command will clear the corresponding Registration Armed status bit (Registration 0
Armed and Registration 1 Armed).
3.2.5. Homing
Certain encoders, such as quadrature encoders, are incremental and do not provide absolute
position. To use an incremental encoder in a position application, a known reference position
must be established. This position is called the Home position. The process of determining the
home position is called Homing. As the encoder is rotated, it increments or decrements the
position from the initial home position, and thereby the position is obtained.
When an axis is homed, the Actual Position of the axis is changed. The Target and Command
positions are also adjusted by the same amount. Therefore, the motion of the axis will not be
affected. It is safe to home an axis when it is moving.
deltamotion.com
55