Resolver fundamentals, Resolver, R resolver – Delta RMC151 User Manual
Page 213
3 Controller Features
counts on the RMC feedback. For example, a 1000 PPR encoder will give the RMC 4000
counts per revolution.
The RMC increments the counts register when A leads B. It decrements the counts
register when B leads A.
Index Pulse
Some quadrature encoders also include a third output channel, called a zero or index or
reference signal, which supplies a single pulse per revolution. This single pulse is used for
precise determination of a reference position. The RMC70 QA module and the RMC150
Quad module have an Index (Z) pulse input; the RMC70 Q1 module does not.
Homing Quadrature Axes
Quadrature encoders do not provide absolute position. To use a quadrature encoder in a
position application, a known reference position must be established. This position is
referred to as the Home position. The process of moving the axis to find the home
position is called Homing. Once the Home position is established, the encoder increments
or decrements the position from the initial home position as it rotates.
There are several methods of homing. Typically, it involves moving the axis to a proximity
switch that then sends a signal to the RMC. The RMC sets the position at that precise
point to whatever value the user requested. The index pulse can also be used for homing.
For details on homing, see the Homing topic.
3.12.5. Resolver Fundamentals
Resolvers are absolute rotary position transducers. They are very simple and robust, can be
very accurate, and, in some cases, inexpensive. A wide variety of resolvers are available in
many configurations and for various applications.
Resolver feedback is supported by the RMC150 Resolver (R) and Resolver (RW) modules.
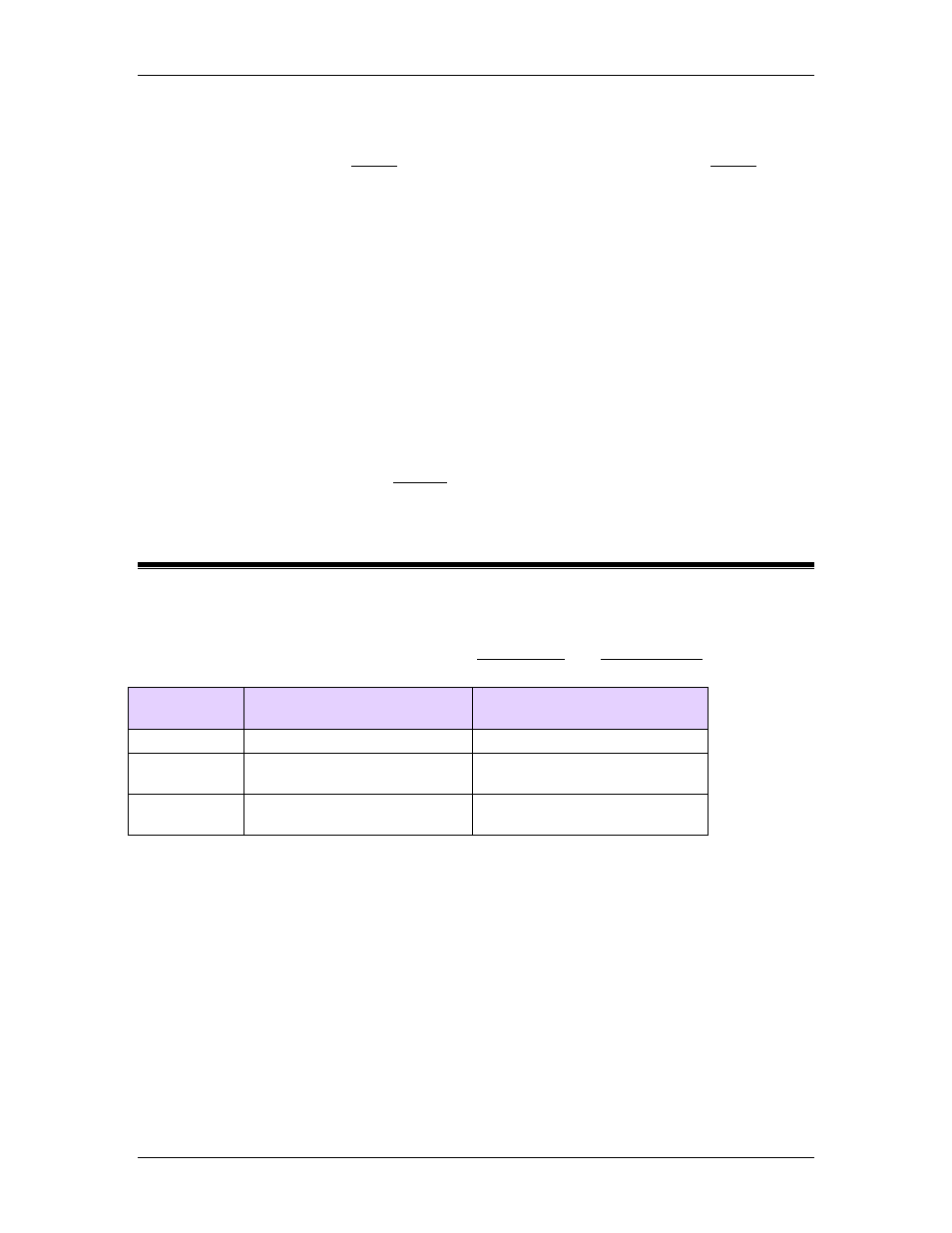
The RMC150 Resolver module supports the following resolver options:
Resolver
Options
Resolver (R) - Standard
Resolver (RW)
Resolution
14 or 16 bits
14 or 16 bits
Reference
Frequency
800Hz to 5kHz
(generated by RMC)
400Hz
(externally generated)
Reference
Amplitude
1.42 to 4.80 V RMS
(generated by RMC)
26 V RMS
(externally generated)
Contact Delta for other options.
How Resolvers Work
Resolvers are rotary transformers with one primary winding and two secondary
windings. The primary winding is generally on the rotor and the two secondary windings
are on the stator. The secondary windings are arranged 90 degrees from each other such
that when one is lined up with the rotor winding (full coupling) the other is at a right
angle (no coupling).
The primary winding is driven with an alternating current signal at a specified voltage and
frequency. This signal is called the Reference Signal and is generated by the RMC. The
position measurement of the resolver is determined by the ratio of the amplitudes of the
signals on the secondary windings and their phase with respect the signal on the primary
winding (the reference signal).
Important Resolver Specifications
deltamotion.com
193