Delta RMC151 User Manual
Page 653
7 Hardware
Rate
Output
Resolution
16 bits
Note:
Linear magnetostrictive SSI transducers must be of the synchronized type. This ensures that
the time between position samples matches the control loop time of the RMC. If the
transducer is not synchronized, the sample time may not match and make precise speed
control difficult.
Blanking Period (For Neuter Outputs)
The RMC70 blanking period is set to 5µsec. Some older transducers, such as Temposonics
I and II with neuter outputs, are not compatible with the RMC70 due to the short
blanking period. They are compatible with the RMC150. For more details, see the MDT
Fundamentals and MDT Blanking Period topics.
Setting Up the MA Module
To set up the MA module, read the following topics:
MA Wiring
MDT Scaling
SSI Scaling
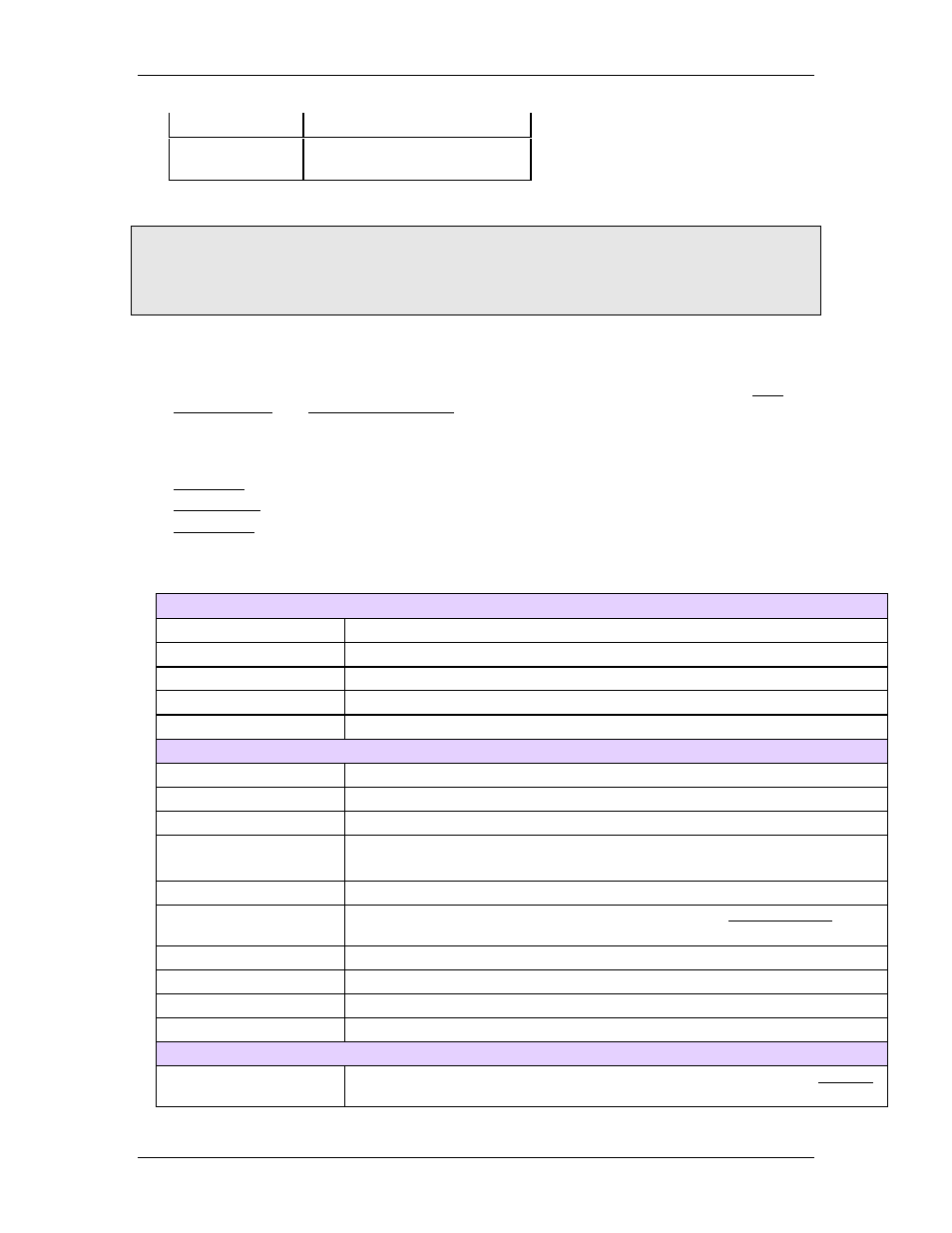
Specifications (per axis)
Each axis is individually selectable for MDT or SSI.
MDT Interface
Inputs Two RS422 differential Note: single-ended is not supported
Outputs Two RS422 differential Note: single-ended is not supported
ESD protection 15 kV
Resolution 0.0005" (12.7 μm) Start/Stop; 0.00005" (1.27 μm) PWM
Count Rate 240 MHz
SSI Interface
Inputs Two RS422 differential
Clock Outputs Two RS422 differential
Clock Frequency Software selectable 150, 250, or 375 kHz.
Input Impedance Data + Input: 148 Ω
Data - Input: 185 Ω
Cable Type Twisted pair, shielded
Cable Length
Maximum
Transducer Dependent, approx. 300-600 ft. See the SSI Clock Rate topic
for details.
ESD protection 15 kV
Resolution Transducer dependent. Down to 1 μm (approx. 0.00004") for MDTs
Count Encoding Binary or Gray Code
Count Data Length 8 to 32 bits
Control Output
Range ±10 V @ 5 mA (2 kΩ or greater load)(For current drive, use the VC2124
accessory:±10 mA to ±200 mA in 10 mA steps)
deltamotion.com
633