Delta RMC151 User Manual
Page 197
3 Controller Features
Custom No Transducer Error Bit
The Custom No Transducer bit in the Custom Error Bits register can be written to from
the user program to provide an error indication. Setting the Custom No Transducer Error
bit will result in the No Transducer axis error bit being set, which will then halt the axis
according to the No Transducer Auto Stop setting.
For example, in an application that controls to the average position of multiple
transducers, if any of the transducers receive a transducer-related error, the control axis
should halt. The user program that calculates the average position can set the No
Transducer bit if any transducer errors in the reference axes have occurred. The
Transducer OK axis status bit is a simple method of determining whether any transducer-
related errors have occurred.
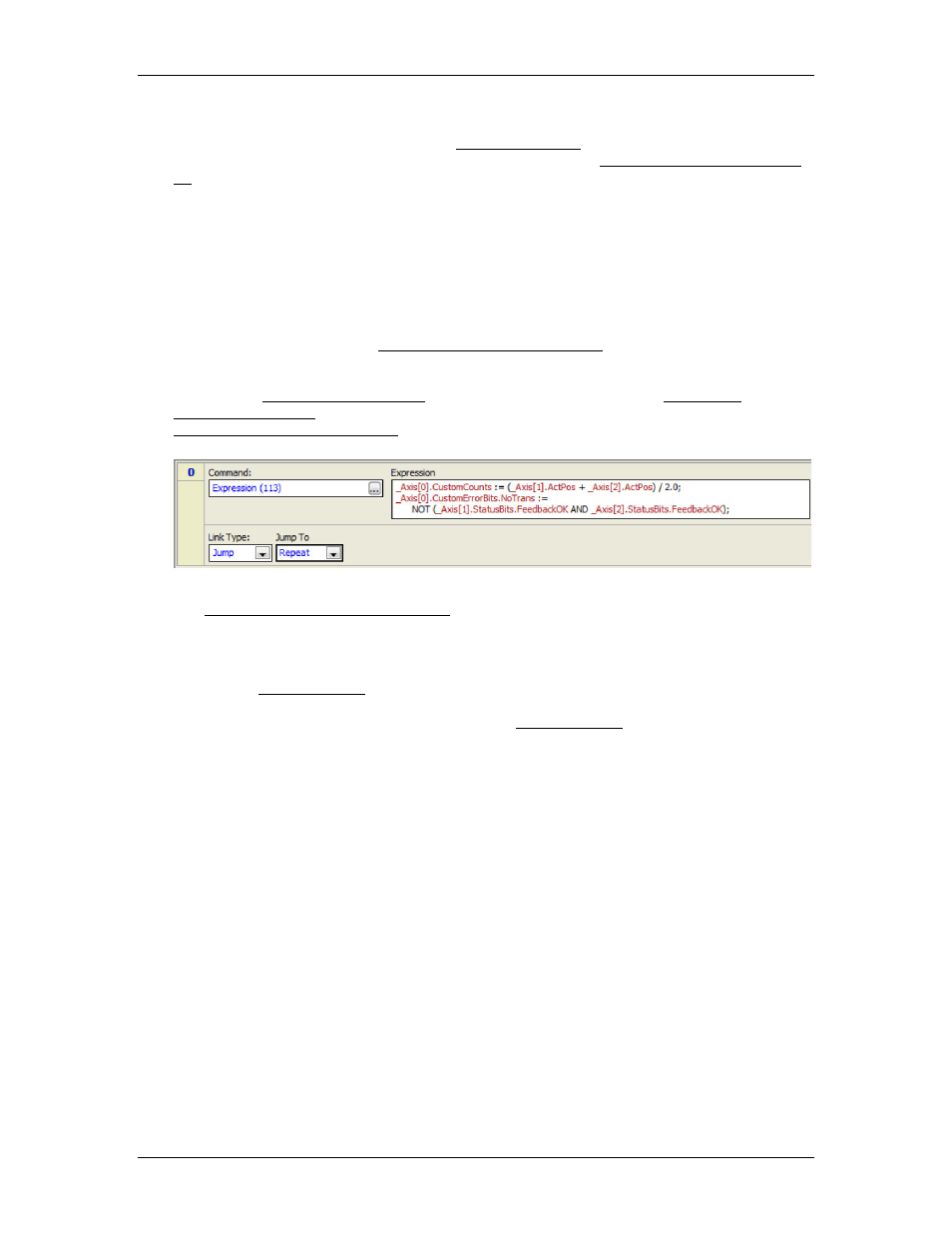
Below is a method using the Custom No Transducer Error bit. In this example, Axis 0 is
the control axis with custom feedback. The feedback is calculated as the average position
of the Axis 1 and Axis 2 reference axes. If the transducer of either reference axis receives
an error, its Feedback OK status bit will turn off and the control axis' Custom No
Transducer Error bit will be set. As soon as the errors in the reference axes clear, the
Custom No Transducer Error bit will also clear, allowing the axis to perform closed-loop
motion.
Custom Feedback Auto-Fault Mode
The Custom Feedback Auto-Fault Mode axis parameter defines certain cases in which the
No Transducer or Prs/Frc No Transducer error bit will automatically be set. The following
options are available:
•
Missed Update (default setting)
If the Custom Counts register is not written to in a given loop time, the No
Transducer error will be set. This is the preferred mode for most applications. In
this mode, you should make sure that the Custom Counts register is written to each
loop time.
•
PROGRAM Mode
If the controller is in PROGRAM mode, the No Transducer error will be set. This
mode may be useful in situations where you do not need to update the Custom
Counts very often, but you do wish to halt the axis if the program that updates the
Custom Counts is stopped due to the controller entering PROGRAM mode.
•
Disabled
The No Transducer error will not be set by any of the above options. In this mode,
the updating of the Custom Counts register is not monitored in any way. This could
be used in cases where the Custom Counts register is being modified from an
external device, such as a PLC.
Additional Error Handling Considerations
In certain Custom Feedback applications cases, such as switching feedback on the fly, it
may be normal for one of the reference axes to receive a transducer error. If you want
the user programs to continue operating, make sure the tasks do not stop when the
reference axis halts due to the error. This can be set in the Programming Properties, on
the Halts page.
deltamotion.com
177