Modeling – Delta RMC151 User Manual
Page 179
3 Controller Features
You can choose to filter these values when they used in the control algorithm. See the
Velocity Filter Type and Acceleration Filter Type topics for details.
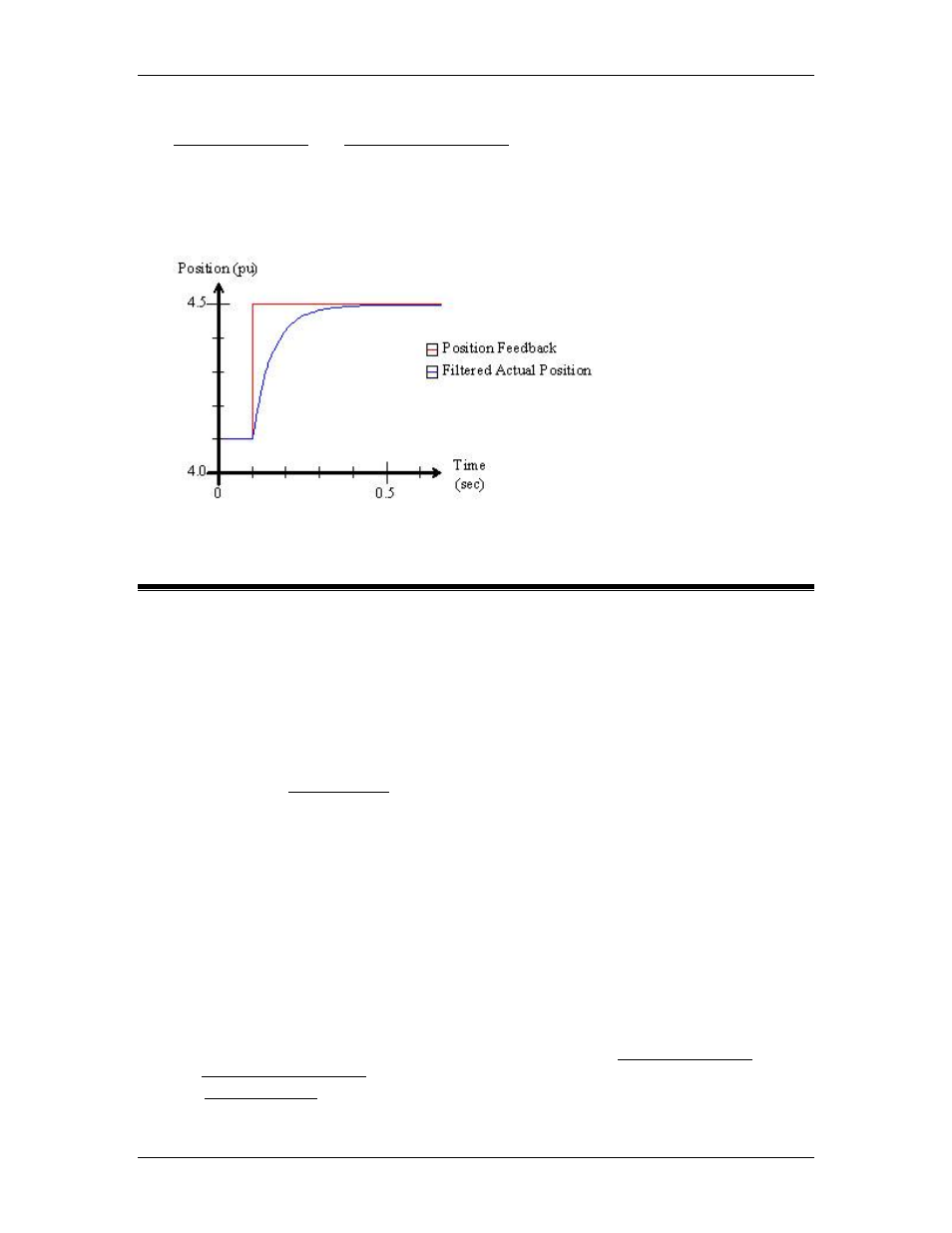
Example
For example, suppose the position feedback makes a step jump from 4.1 to 4.5 position
units. With the position filter disabled (set to zero), the Actual Position would also make
a step jump. By applying a non-zero filter, the Actual Position is filtered, and does not
make a step jump:
3.8.2. Modeling
Each position, pressure, or force control axis on the RMC can have a system model. A model is
an approximate mathematical representation of a real motion system. Directly manipulating
the model is typically an advanced feature. Most RMC users will never need to be concerned
with the system model.
The model parameters are in the Axis Tools, All tab, Feedback section, in the
Filtering/Modeling section.
The system model is used by the Gain Calculator or for Model-based Filtering:
1. Gain Calculator
When using the Tuning Wizard for tuning position, pressure, or force axes, a model is
generated for that axis. Once this model is created, the Gain Calculator uses it to provide
a range of gains appropriate for that model. The user chooses a set of gains with a slider
bar.
2. Model-based Velocity and Acceleration Filtering (Position Axes Only)
On standard position control axes, the RMC derives the velocity and acceleration from the
position feedback by differentiating the position. It then uses these values in the position
control algorithms. This method of deriving the velocity and acceleration causes
quantization errors. More accurate values of velocity and acceleration can be obtained by
observing the system as it moves, constantly updating the model according to the
system's behavior, and deriving the velocity and acceleration from the model. This can
result in improved control.
For most systems, using model-based velocity and acceleration filtering is not necessary.
It may improve the control on certain difficult-to-control systems.
To use model-based velocity and acceleration filtering, set the Velocity Filter Type and/or
the Acceleration Filter Type parameters to Model.
The Model Response parameter determines how quickly the model responds to the
motion.
deltamotion.com
159