Delta RMC151 User Manual
Page 57
2 Starting Up the RMC
The Acceleration Feed Forward parameter is particularly useful for systems moving large
masses with relatively small cylinders. Such systems often have a delay before the start
of movement. The Acceleration Feed Forward terms can help compensate for this delay.
•
Start with a small value of Acceleration Feed Forward. Remember that it is a floating
point number, and you will very likely have to start with a number much smaller than
1, such as 0.001, depending on your system.
Tip:
For a 2.5 in bore hydraulic cylinder with a max velocity of 30 in/sec, the
Acceleration Feed Forward is typically on the order of 0.01 to 0.3. Start with a small
value.
•
Look for following errors during acceleration and deceleration. Increase the
Acceleration Feed Forward parameter until the errors disappear.
•
If you are using Ratioed gains, make sure to adjust both Acceleration Feed Forwards.
•
Click the Download button to apply the changes to the RMC.
Plots
Look at these plots for examples of good and bad plots at this step. Be aware that not all
systems will be like these examples.
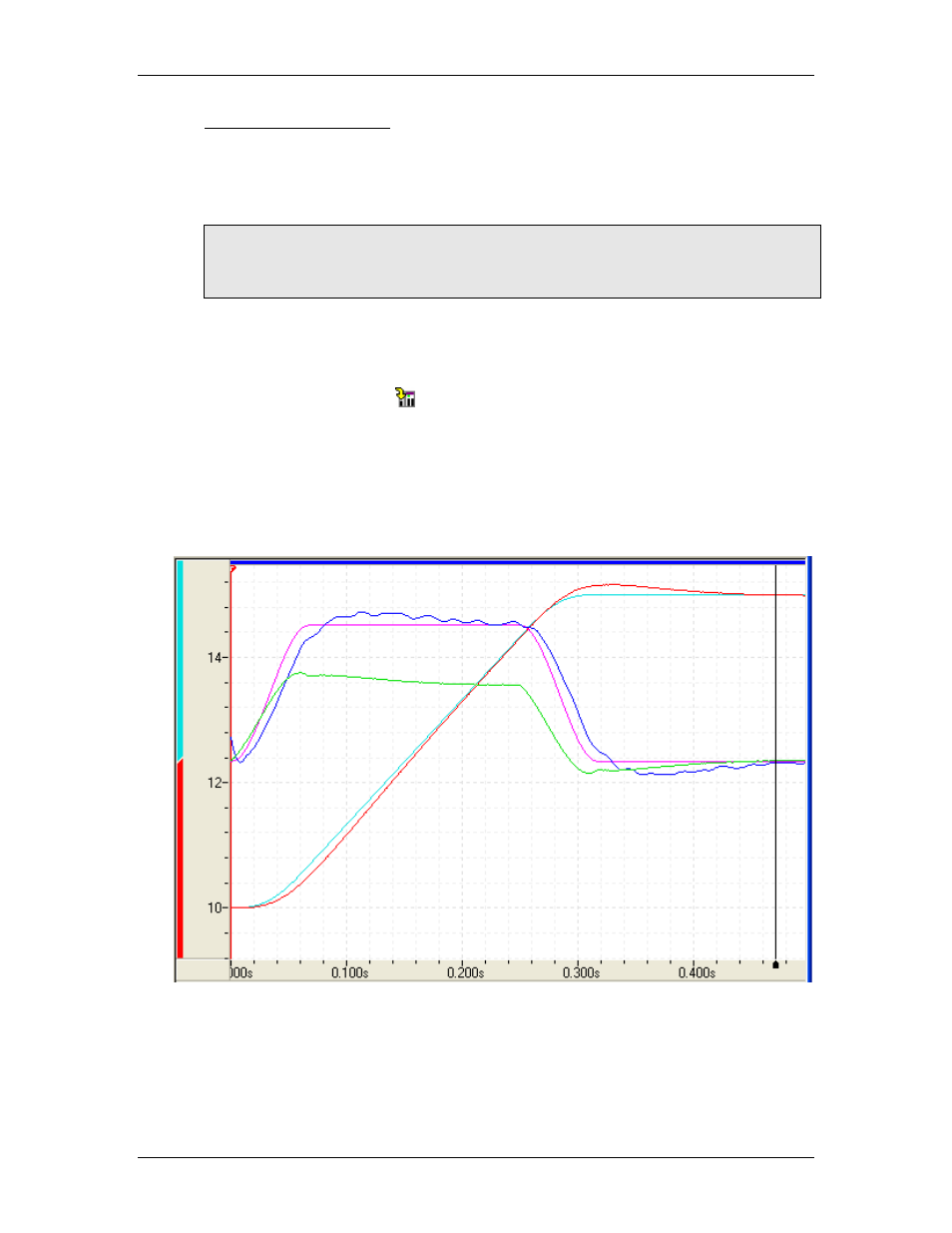
Too little Acceleration Feed Forward
The Actual Position lags the Target Position during the acceleration at the beginning of the
move, and overshoots during the deceleration at the end of the move.
Too much Acceleration Feed Forward
The Actual Position starts leading during the acceleration and undershoots during the
deceleration.
deltamotion.com
37