Filtering/modeling, Filtering, G filtering – Delta RMC151 User Manual
Page 178: Be filtered
RMC70/150 and RMCTools User Manual
This type of control can be done on any control axis with pressure feedback, whether or
not the axis also has position feedback. The algorithm in the open-loop case works the
same as in the Closed Loop Move case, except that the Output of the pressure PID is
compared to the open-loop Control Output. The smaller of these values is then used for
the Control Output.
Pressure/force limit with open loop is typically not very useful, as standard pressure/force
control is easier and generally provides better control.
3.8. Filtering/Modeling
3.8.1. Filtering
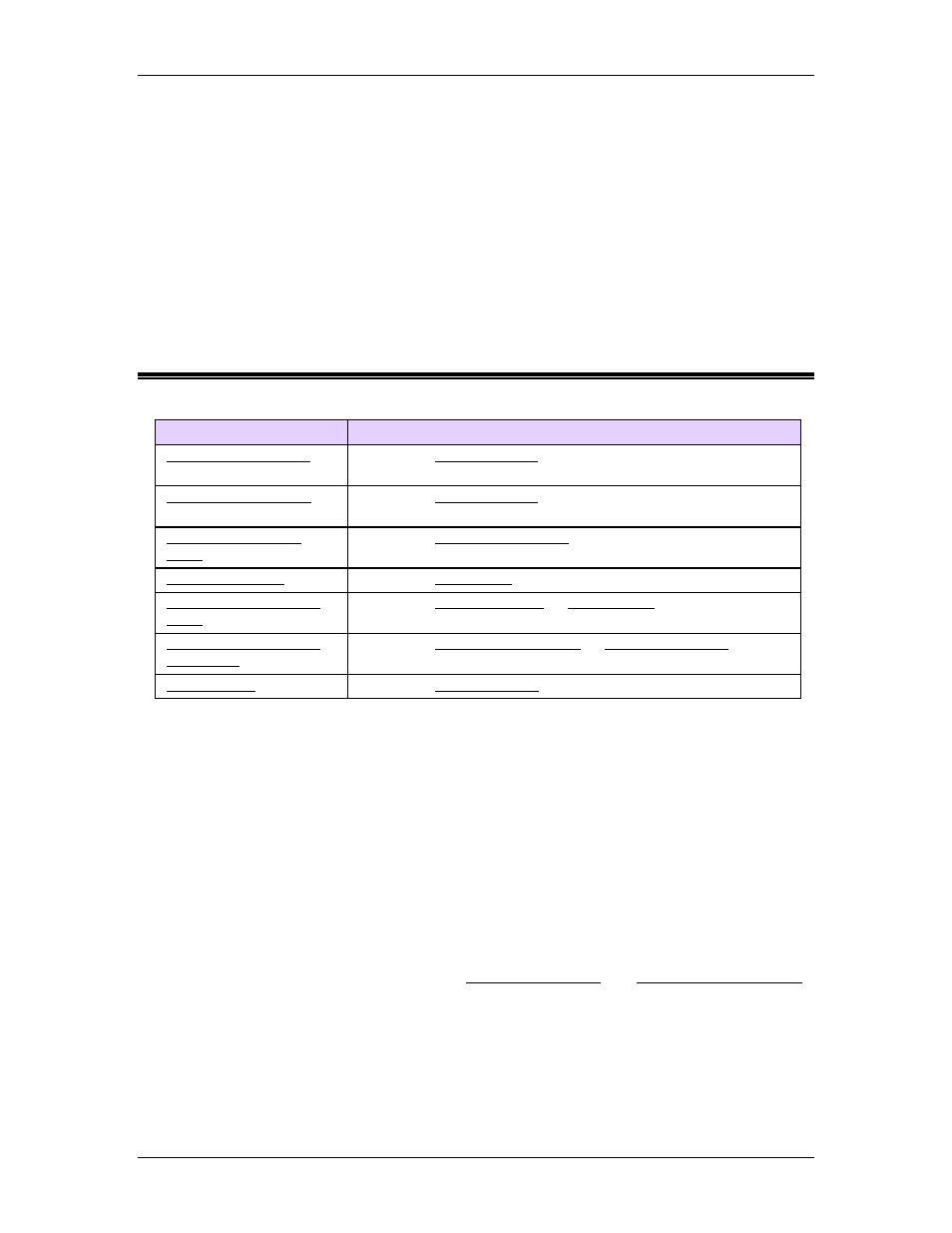
The RMC provides the following filters for control:
Filter
Description
Filters the Actual Position feedback. Not recommended for
position control axes.
Filters the Actual Velocity feedback. Not recommended for
velocity control axes.
Filters the Actual Acceleration feedback.
Filters the Actual Jerk feedback.
Filters the Actual Pressure or Actual Force.
Filters the Actual Pressure Rate or Actual Force Rate
feedback.
Filters the Control Output.
Filter Basics
Filtering can be used to smooth values. For example, a reference axis with noisy position
feedback will be smoother if the feedback is filtered. All the filters except the Output Filter
are a low-pass 4-pole Butterworth filter. The filter value specifies the 3dB cut-off
frequency in hertz. A value of zero disables the filter.
Filtering can be especially useful on reference axes. For example, consider a control axis
that is geared to a reference axis. The reference axis is controlled by a potentiometer.
When the operator turns the potentiometer, it produces a fairly noisy signal. The axis that
is geared to this noisy signal will, in turn, produce jerky motion. To smooth the motion, a
filter can be applied to the reference Actual Position.
Filtering increases the phase delay in the filtered value. By default, filtering is applied to
the Velocity and Acceleration values used for status and for plots, but it is not applied to
the values used for control because of the phase delay filtering introduces. Therefore,
filtering should be left out of systems that need to react to quick changes. You can select
to use filtered values for control with the Velocity Filter Type and Acceleration Filter Type
parameters.
Filtering the Control Values
On a position axis, the actual velocity and actual acceleration are very noisy due to
quantization errors. By default, these values are filtered in the status, but they are not
filtered when used in the control algorithm.
158
Delta Computer Systems, Inc.