Delta RMC151 User Manual
Page 130
RMC70/150 and RMCTools User Manual
The Track commands provide gearing, with limits on the position, velocity, acceleration
and jerk. These commands are useful for smoothly tracking a signal containing noise or
step-jumps, or for gearing to another position while not exceeding specified motion limits.
Continuously tracks the specified master register.
The axis position is limited by the positive and
negative travel limits, and the specified velocity,
acceleration, and jerk limits.
Continuously tracks the specified master register.
The axis will be controlled using the I-PD
algorithm. The axis position is limited by the
positive and negative travel limits and the
specified velocity.
Gear Modifying Commands
These commands modify an existing gearing relationship.
Superimposes a move of the requested distance
onto the currently-geared axis while the master
moves the specified distance.
For very advanced gearing applications. It is
intended to be used in user programs along with
mathematical calculations.
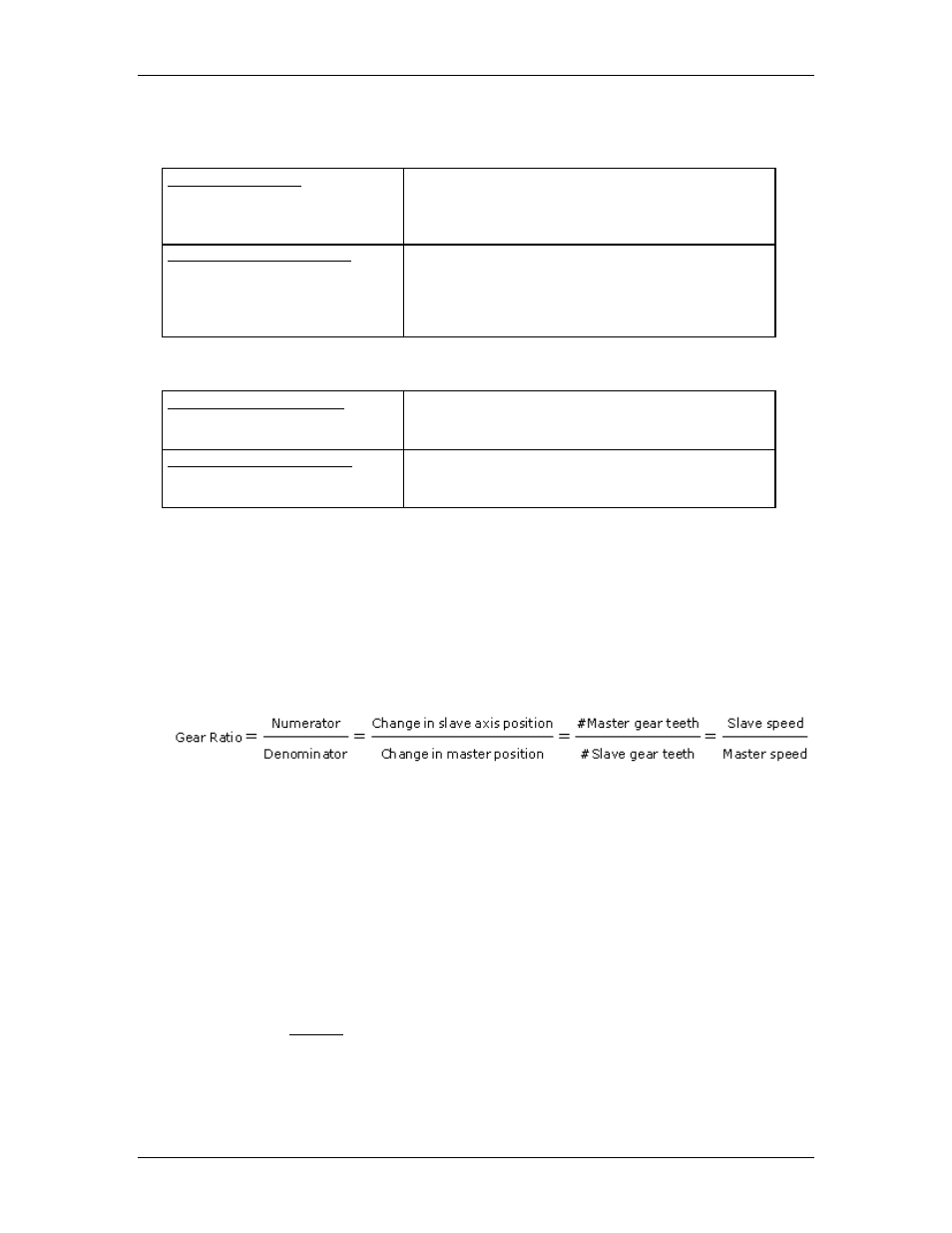
Gear Ratio
The gear ratio specifies the gearing of the axis to its master. To make gearing infinitely
accurate in more applications, most of the RMC gear commands use a Numerator and
Denominator to specify the ratio. For example, if a user has a rotary application and
needs a gear ratio of 1:3, it cannot be represented with a single decimal number.
However, the Numerator and Denominator will represent this accurately and the system
can gear for any number of revolutions without losing the position.
The Numerator is the distance the slave axis travels as the master travels the distance
specified by the Denominator. This relationship is shown below in equivalent equations:
Gear Ratio of Zero (0)
A gear ratio of zero will cause the slave axis to stop. This can be very useful if the axis is
already geared. By specifying a gear ratio of zero and clutching by distance, the slave can
be instructed to stop when the master reaches a certain position.
High Gear Ratios
High gear ratios can cause unstable control. A high gear ratio will cause the slave axis to
move a large distance while the master moves a small distance. Any noise in the master
will be amplified in the motion of the slave axis. In addition, the feedback increments will
be amplified. Try to avoid high gear ratios.
If a high gear ratio cannot be avoided, try to use the lowest noise and highest resolution
feedback possible on the master axis. This will minimize the amplification of the feedback
increments and noise. If the master axis is a control axis, make sure the motion is
smooth and minimize quick changes in velocity. If the master axis is a reference axis,
consider adding filtering to it to reduce noise.
Gear Absolute
The Gear Absolute commands do not use a numerator and denominator. Instead, the
gearing relationship is defined with Master Point A, Master Point B, Slave Point A, Slave
110
Delta Computer Systems, Inc.